Покажите модель робота на рисунке
show( использует объединенные положения, заданные в robot,configuration)configuration показать системы координат тела робота.
show(___,Name,Value) задает опции с помощью одного или нескольких аргументов пары "имя-значение" в дополнение к любой комбинации входных параметров от предыдущих синтаксисов. Например, 'Frames','off' скрывает системы координат твердого тела на рисунке.
ax = show(___)
Можно импортировать роботов, которые имеют .stl файлы, сопоставленные с файлом Объединенного формата описания робота (URDF), чтобы описать визуальные конфигурации робота. Каждое твердое тело имеет отдельную визуальную заданную геометрию. importrobot функционируйте анализирует файл URDF, чтобы получить робота и визуальные конфигурации модели. Функция принимает, что визуальная геометрия и геометрия столкновения робота являются тем же самым, и присваивает визуальные конфигурации как конфигурации столкновения corresponsing тел.
Используйте show функционируйте, чтобы отобразить визуальные и collosion конфигурации модели робота на рисунке. Можно затем взаимодействовать с моделью путем нажатия на компоненты, чтобы смотреть их и щелчка правой кнопкой, чтобы переключить видимость.
Импортируйте модель робота как файл URDF. .stl расположение файлов должно быть правильно задано в этом URDF. Добавить другой .stl файлы к отдельным твердым телам, смотрите addVisual.
robot = importrobot('iiwa14.urdf');Визуализируйте робота со связанной визуальной моделью. Кликните по телам или системам координат, чтобы смотреть их. Щелкните правой кнопкой по телам, чтобы переключить видимость для каждой визуальной геометрии.
show(robot,'visuals','on','collision','off');

Визуализируйте робота со связанными конфигурациями столкновения. Кликните по телам или системам координат, чтобы смотреть их. Щелкните правой кнопкой по телам, чтобы переключить видимость для каждой геометрии столкновения.
show(robot,'visuals','off','collision','on');

Покажите различные настройки робота, созданного с помощью RigidBodyTree модель. Используйте homeConfiguration или randomConfiguation функции, чтобы сгенерировать структуру, которая задает все объединенные положения.
Загрузите роботов в качестве примера как RigidBodyTree объекты.
load exampleRobots.matСоздайте структуру для домашней настройки робота Пумы. Структура имеет объединенные имена и положения для каждого тела на модели робота.
config = homeConfiguration(puma1)
config=1×6 struct array with fields:
JointName
JointPosition
Покажите домашнюю настройку с помощью show. Вы не должны задавать вход настройки.
show(puma1);

Измените настройку и установите второе объединенное положение на pi/2. Покажите получившееся изменение в настройке робота.
config(2).JointPosition = pi/2; show(puma1,config);

Создайте случайные настройки и покажите им.
show(puma1,randomConfiguration(puma1));

Используйте параметры Denavit-Hartenberg (DH) робота Puma560®, чтобы создать робота. Каждое твердое тело добавляется по одному, с дочерним элементом к родительскому элементу преобразовывают заданный объединенным объектом.
Параметры DH задают геометрию робота с отношением к тому, как каждое твердое тело присоединено к своему родительскому элементу. Для удобства установите параметры для робота Puma560 в матрице [1]. Робот Пумы является последовательным цепочечным манипулятором. Параметры DH относительно предыдущей линии в матрице, соответствуя предыдущему объединенному прикреплению.
dhparams = [0 pi/2 0 0;
0.4318 0 0 0
0.0203 -pi/2 0.15005 0;
0 pi/2 0.4318 0;
0 -pi/2 0 0;
0 0 0 0];Создайте объект дерева твердого тела создать робота.
robot = rigidBodyTree;
Создайте первое твердое тело и добавьте его в робота. Добавить твердое тело:
Создайте rigidBody возразите и дайте ему уникальное имя.
Создайте rigidBodyJoint возразите и дайте ему уникальное имя.
Используйте setFixedTransform задавать преобразование от тела к телу с помощью параметров DH. Последний элемент параметров DH, theta, проигнорирован, потому что угол зависит от объединенного положения.
Вызовите addBody присоединить первый сустав к базовой системе координат робота.
body1 = rigidBody('body1'); jnt1 = rigidBodyJoint('jnt1','revolute'); setFixedTransform(jnt1,dhparams(1,:),'dh'); body1.Joint = jnt1; addBody(robot,body1,'base')
Создайте и добавьте другие твердые тела в робота. Задайте предыдущее имя тела при вызове addBody присоединить его. Каждое фиксированное преобразование относительно предыдущей объединенной координатной системы координат.
body2 = rigidBody('body2'); jnt2 = rigidBodyJoint('jnt2','revolute'); body3 = rigidBody('body3'); jnt3 = rigidBodyJoint('jnt3','revolute'); body4 = rigidBody('body4'); jnt4 = rigidBodyJoint('jnt4','revolute'); body5 = rigidBody('body5'); jnt5 = rigidBodyJoint('jnt5','revolute'); body6 = rigidBody('body6'); jnt6 = rigidBodyJoint('jnt6','revolute'); setFixedTransform(jnt2,dhparams(2,:),'dh'); setFixedTransform(jnt3,dhparams(3,:),'dh'); setFixedTransform(jnt4,dhparams(4,:),'dh'); setFixedTransform(jnt5,dhparams(5,:),'dh'); setFixedTransform(jnt6,dhparams(6,:),'dh'); body2.Joint = jnt2; body3.Joint = jnt3; body4.Joint = jnt4; body5.Joint = jnt5; body6.Joint = jnt6; addBody(robot,body2,'body1') addBody(robot,body3,'body2') addBody(robot,body4,'body3') addBody(robot,body5,'body4') addBody(robot,body6,'body5')
Проверьте, что ваш робот был создан правильно при помощи showdetails или show функция. showdetails списки все тела в командном окне MATLAB®. show отображает робота с данной настройкой (домой по умолчанию). Вызовы axis измените пределы по осям и скройте подписи по осям.
showdetails(robot)
-------------------- Robot: (6 bodies) Idx Body Name Joint Name Joint Type Parent Name(Idx) Children Name(s) --- --------- ---------- ---------- ---------------- ---------------- 1 body1 jnt1 revolute base(0) body2(2) 2 body2 jnt2 revolute body1(1) body3(3) 3 body3 jnt3 revolute body2(2) body4(4) 4 body4 jnt4 revolute body3(3) body5(5) 5 body5 jnt5 revolute body4(4) body6(6) 6 body6 jnt6 revolute body5(5) --------------------
show(robot);
axis([-0.5,0.5,-0.5,0.5,-0.5,0.5])
axis off
[1] Corke, P. I. и Б. Армстронг-Хелуври. “Поиск Согласия среди Параметров модели, о которых Сообщают для робота PUMA 560”. Продолжения 1 994 Международных конференций IEEE по вопросам Робототехники и Автоматизации, IEEE Comput. Soc. Нажмите, 1994, стр 1608–13. DOI.org (Crossref), doi:10.1109/ROBOT.1994.351360.
Загрузите модель робота и измените сетки столкновения. Очистите существующие сетки столкновения, добавьте простые примитивы объекта столкновения и проверяйте, являются ли определенные настройки в столкновении.
Загрузите модель робота
Загрузите предварительно сконфигурированную модель робота в рабочую область с помощью loadrobot функция. Этой модели уже задали сетки столкновения для каждого тела. Выполните итерации через все элементы твердого тела и очистите существующие сетки столкновения. Подтвердите, что существующих сеток не стало.
robot = loadrobot('kukaIiwa7','DataFormat','column'); for i = 1:robot.NumBodies clearCollision(robot.Bodies{i}) end show(robot,'Collisions','on','Visuals','off');

Добавьте цилиндры столкновения
Итеративно добавляйте цилиндр столкновения к каждому телу. Пропустите некоторые тела для этой определенной модели, как они перекрываются и всегда сталкиваются с исполнительным элементом конца (тело 10).
collisionObj = collisionCylinder(0.05,0.25); for i = 1:robot.NumBodies if i > 6 && i < 10 % Skip these bodies. else addCollision(robot.Bodies{i},collisionObj) end end show(robot,'Collisions','on','Visuals','off');

Проверяйте на столкновения
Сгенерируйте серию случайных настроек. Проверяйте, является ли робот в столкновении в каждой настройке. Визуализируйте каждую настройку, которая имеет столкновение.
figure rng(0) % Set random seed for repeatability. for i = 1:20 config = randomConfiguration(robot); isColliding = checkCollision(robot,config); if isColliding show(robot,config,'Collisions','on','Visuals','off'); title('Collision Detected') else % Skip non-collisions. end end

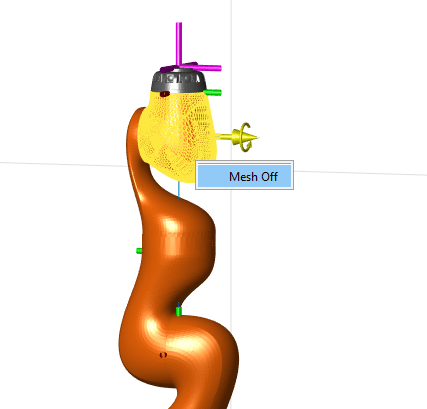
Вашей модели робота сопоставили визуальные компоненты с ним. Каждый rigidBody объект содержит координатную систему координат, которая отображена как система координат тела. Каждому телу также можно было сопоставить визуальные сетки с ними. По умолчанию оба из этих компонентов отображены автоматически. Можно смотреть или изменить визуальные компоненты отображения дерева твердого тела. Кликните по системам координат тела или визуальным сеткам, чтобы подсветить их в желтом и видеть связанное имя тела, индекс и объединенный тип. Щелкните правой кнопкой, чтобы переключить видимость отдельных компонентов.
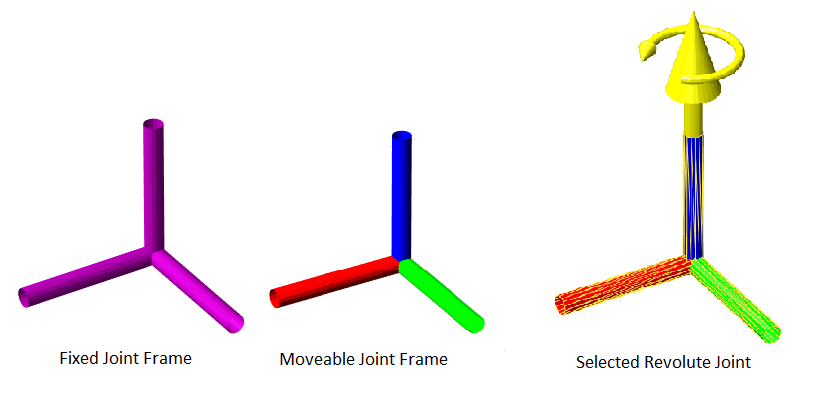
Системы координат тела: Отдельные системы координат тела отображены как координатная система координат с 3 осями. Фиксированные системы координат являются розовыми системами координат. Подвижные объединенные типы отображены как оси RGB. Можно кликнуть по системе координат тела, чтобы видеть ось движения. Призматические соединения показывают желтую стрелу в направлении оси движения и, шарнирные соединения показывают круговую стрелку вокруг оси вращения.
Визуальные Сетки: Отдельные визуальные конфигурации заданы с помощью addVisual или при помощи importrobot импортировать модель робота с .stl файлы заданы. Путем щелчка правой кнопкой по отдельным телам по фигуре можно выключить их сетки или задать Visuals пара "имя-значение", чтобы скрыть все визуальные конфигурации.