Чтобы визуализировать симулированные данные о применении данных или приложении реального времени нев реальном времени, используйте MATLAB® функции построения графика.
После выполнения вашего приложения реального времени и регистрации данных к рабочему пространству MATLAB, можно отобразить данные на графике.
Эта процедура использует модель sldrtex_model. Чтобы открыть эту модель, в командном окне MATLAB, введите:
open_system(docpath(fullfile(docroot,'toolbox',... 'sldrt','examples','sldrtex_model')))
Это принимает, что вы сохранили свои данные к переменной ScopeData.
Шаги в этой процедуре принимают, что вы уже загрузили ту модель и завершили шаги в Установленных Параметрах Осциллографа для Логгирования к Запуску Рабочей области и Набора в Kernel Mode Properties для Логгирования к Рабочей области.
В Simulink® Редактор, на вкладке Desktop Real-Time, нажимает Run in Real Time.
Когда приложение реального времени запускается, оно создает ScopeData переменная, которую вы сконфигурировали в Запуске Набора в Kernel Mode Properties для Логгирования к Рабочей области.
Показать структуру переменной ScopeDataВ Командном Окне MATLAB введите:
ScopeData
ScopeData =
struct with fields:
time: [2001×1 double]
signals: [1×1 struct]
blockName: 'sldrtex_model/Scope'Перечислять содержимое структуры signalsВвод:
ScopeData.signals
ans =
struct with fields:
values: [2001×1 double]
dimensions: 1
label: ''
title: ''
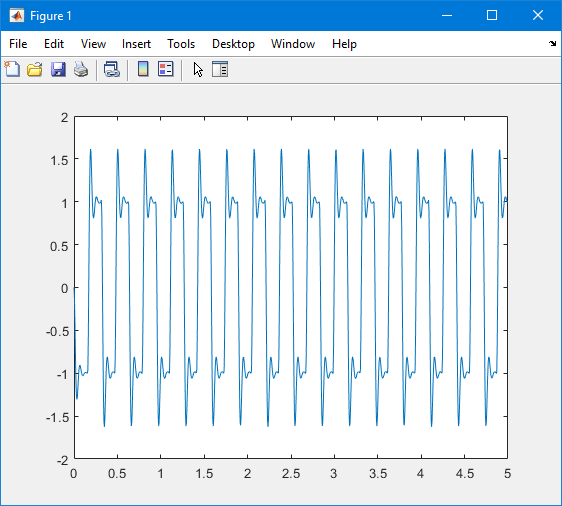
plotStyle: 0Построить первый 1000 точки, введите:
plot(ScopeData.time(1:1000),ScopeData.signals.values(1:1000))
Среда MATLAB строит первый 1000 выборки по 0.0000–0.9990 секунды.
Переменная ScopeData не автоматически сохранено в ваш жесткий диск. Сохранить переменную ScopeDataВвод:
save ScopeDataСреда MATLAB сохраняет данные об осциллографе к файлу ScopeData.mat.
