Вычислите направление без препятствий с помощью данных о датчике области значений и предназначайтесь для положения
UAV Toolbox / Алгоритмы
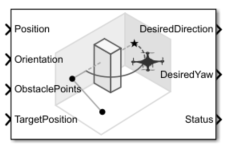
Блок Obstacle Avoidance вычисляет направление без препятствий с помощью данных о датчике области значений и целевого положения.
Position — Положение UAVПоложение UAV в виде вектора из формы [x; y; z], в метрах.
Пример:
[1; 1; 1]
Типы данных: double
Orientation — Ориентация UAVОриентация UAV в виде вектора кватерниона из формы [w; x; y; z].
Пример: [1; 0; 0; 0]
Типы данных: double
ObstaclePoints — Положения препятствийПоложения препятствий в виде N-by-3 матрица со строками формы [x y z]
, в метрах. N является количеством точек препятствия.
Пример: [1 1 1; 2 2 2]
Типы данных: double
TargetPostion — Положение целиПоложение цели в виде вектора из формы [x; y; z], в метрах.
Пример: [2; 3; 4]
Типы данных: double
DesiredDirection — Желаемое направлениеЖелаемое направление, возвращенное как вектор из формы [x; y; z], в метрах.
Типы данных: double
DesiredYaw — Желаемое рысканиеЖелаемое рыскание, возвращенное в виде числа в радианах в области значений [-pi, pi].
Типы данных: double
Status — Состояние направления без препятствийСостояние направления без препятствий, возвращенного как 0 или 1. Значением является 1 когда блок находит препятствие свободным направлением. В противном случае этим выходом является 0.
Типы данных: uint8
Sensor range limits (m) — Пределы датчика области значений[min max]
Задайте минимальные и максимальные пределы датчика области значений как вектор из формы [min max]
, со значениями в метрах.
Типы данных: double
Sensor horizontal field of view (deg) — Горизонтальные пределы поля зрения датчика области значений[min max]
Задайте минимальные и максимальные горизонтальные пределы поля зрения датчика области значений как вектор из формы [min max]
, со значениями в градусах.
Типы данных: double
Sensor vertical field of view (deg) — Вертикальные пределы поля зрения датчика области значений[min max]
Задайте минимальные и максимальные вертикальные пределы поля зрения датчика области значений как вектор из формы [min max]
, со значениями в градусах.
Типы данных: double
Sensor location [X, Y, Z] (m) — Местоположение монтирования датчика на UAV[x y z]
Задайте монтирующееся местоположение датчика на UAV как вектор из формы [x y z]
, со значениями в метрах.
Типы данных: double
Sensor orientation [Roll, Pitch, Yaw] (deg) — Ориентация датчика смонтирована на UAV[roll pitch yaw]
Задайте ориентацию датчика, смонтированного на UAV как вектор из формы [roll pitch yaw]
, со значениями в градусах.
Типы данных: double
Vehicle radius (m) — Радиус UAVЭта размерность задает самый маленький круг, который может ограничить ваше транспортное средство в метрах. Радиус транспортного средства используется с учетом размера транспортного средства при вычислении направления без препятствий.
Типы данных: double
Minimum distance to obstacle (m) — Расстояние безопасности вокруг UAV к препятствиюРасстояние безопасности задает в метрах, пробел составлял между UAV и препятствиями в дополнение к радиусу транспортного средства. Радиус транспортного средства и расстояние безопасности используются для расчета направление без препятствий.
Типы данных: double
Simulate using — Тип симуляции, чтобы запуститьсяInterpreted execution (значение по умолчанию) | Code generationЗадайте, симулировать ли модель с помощью Interpreted execution или Code generation.
Interpreted execution — Симулируйте модель с помощью MATLAB® интерпретатор. Эта опция уменьшает время запуска, но имеет более медленную скорость симуляции, чем Code generation. В этом режиме можно отладить исходный код блока.
Code generation — Симулируйте модель с помощью сгенерированного кода C. В первый раз вы запускаете симуляцию, Simulink® генерирует код С для этого блока. Код С снова используется для последующих симуляций, пока модель не изменяется. Эта опция требует дополнительного времени запуска, но скорость последующих симуляций сопоставима с Interpreted execution.
Настраиваемый: нет
Histogram resolution (deg) — Разрешение сетки гистограммы1| 3 Чтобы изменить разрешение сетки гистограммы, выберите значение из списка. Все значения в градусах.
Histogram window size — Размер окна гистограммыРазмер окна гистограммы определяет угловую ширину открытия без препятствий в направлениях вертикального изменения и азимуте. Это значение безразмерно.
Типы данных: uint8
Histogram threshold — Порог для вычислительной гистограммыПорог для вычисления гистограммы задает минимальное количество точек препятствия, которые должны быть в ячейке гистограммы, которая будет рассмотрена как препятствие. Если ячейка содержит меньше, чем это количество точек препятствия, ячейка рассматривается как без препятствий.
Типы данных: uint8
Maximum age of obstacle point — Максимальный возраст помнившей точки препятствияЗадает максимальный возраст помнившей точки препятствия в виде числа. Это значение задает количество предыдущих временных шагов, за которые точки препятствия от тех временных шагов помнится.
Типы данных: double
Target direction weight — Вес функции стоимости для целевого направленияЗадает функциональный вес для перемещения к целевому направлению. Чтобы следовать за целевым направлением, установите этот вес быть больше суммы Current direction weight и Previous direction weight. Чтобы проигнорировать целевую стоимость направления, установите этот вес на 0.
Типы данных: double
Current direction weight — Вес функции стоимости для текущего направленияЗадает функциональный вес для перемещения транспортного средства в текущих направлениях заголовка. Более высокие значения этого веса производят эффективные пути. Чтобы проигнорировать текущую стоимость направления, установите этот вес на 0.
Типы данных: double
Previous direction weight — Вес функции стоимости для предыдущего направленияЗадает функциональный вес для того, чтобы приблизиться ранее выбранное руководящее направление. Более высокие значения этого веса производят более сглаженные пути. Чтобы проигнорировать предыдущую стоимость направления, установите этот вес на 0.
Типы данных: double
1. Если смысл перевода понятен, то лучше оставьте как есть и не придирайтесь к словам, синонимам и тому подобному. О вкусах не спорим.
2. Не дополняйте перевод комментариями “от себя”. В исправлении не должно появляться дополнительных смыслов и комментариев, отсутствующих в оригинале. Такие правки не получится интегрировать в алгоритме автоматического перевода.
3. Сохраняйте структуру оригинального текста - например, не разбивайте одно предложение на два.
4. Не имеет смысла однотипное исправление перевода какого-то термина во всех предложениях. Исправляйте только в одном месте. Когда Вашу правку одобрят, это исправление будет алгоритмически распространено и на другие части документации.
5. По иным вопросам, например если надо исправить заблокированное для перевода слово, обратитесь к редакторам через форму технической поддержки.

