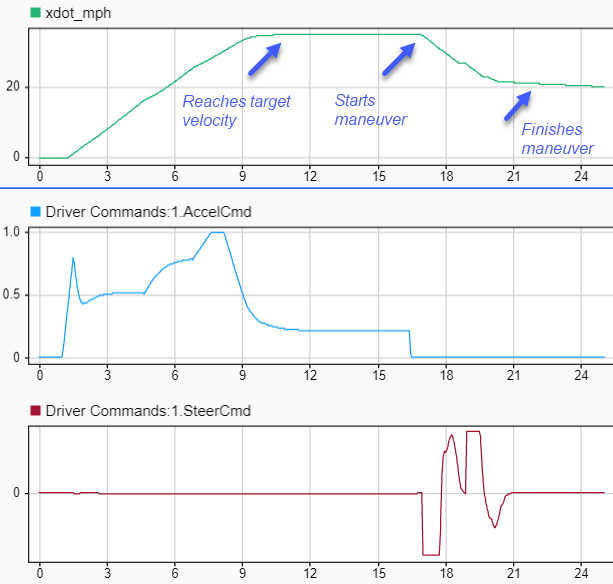
Этот пример показывает вам, как использовать установившиеся рабочие точки, чтобы запустить маневр на целевом скоростном заданном значении. Когда вы начинаете симуляцию с транспортного средства в покое, транспортное средство ускоряется, пока это не достигает целевой скорости, прежде чем это запустит маневр. Время выполнения симуляции включает время для получения транспортного средства до скорости. Например, с двойным маршрутом по умолчанию изменяют настройки маневра, симуляция занимает ~11 с, чтобы достигнуть целевой скорости и ~17 с, чтобы запустить маневр. Маневр занимает ~5 с 25 с времени симуляции.
Чтобы сохранить время симуляции, можно запустить симуляцию при целевой скорости. Во-первых, вы находите установившиеся условия, когда транспортное средство действует при целевой скорости. Если у вас есть установившееся решение, можно использовать его, чтобы инициализировать транспортное средство и запустить маневр при целевой скорости.
Выполните эти шаги.
Создайте и откройтесь, рабочая копия двойного маршрута изменяют проект примера готовых узлов.
На блоке Lane Change Reference Generator, установленном параметр Steady-state initial conditions на Solve using block parameters.
Параметр блока Longitudinal entrance velocity setpoint, xdot_r задает целевую скорость 35 mph.
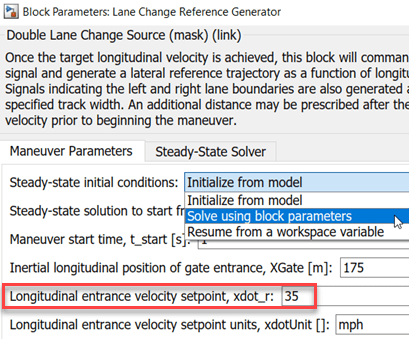
На вкладке Steady-State Solver проверьте начальные условия, переменную рабочей области и параметры установки решателя. В данном примере установите Workspace variable name to generate, ssWSName на dlcSS35mph.
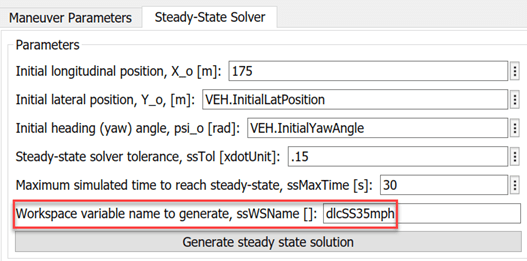
Нажмите Apply.
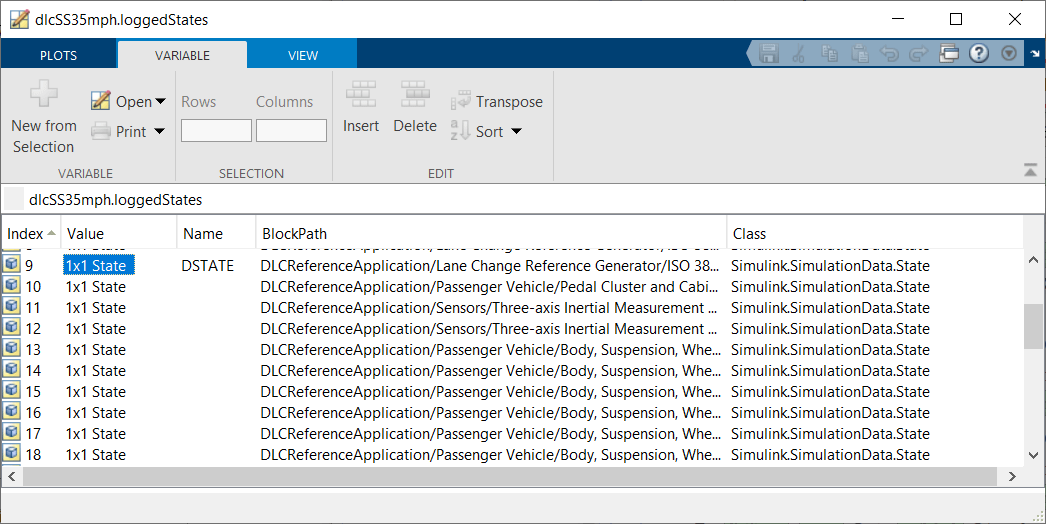
Нажмите Generate steady state solution. После того, как симуляция завершается, исследуйте dlcSS35mph переменная рабочей области. Это содержит регистрируемые состояния приблизительно для 40 переменных состояния модели в установившихся рабочих точках, включая приостановку.
Примечание
Проверьте, что генерация установившегося решения создала или обновила рабочую область. Если модель не может найти установившееся решение, попробуйте различный параметр или настройки решателя.
На блоке Lane Change Reference Generator, наборе:
Steady-state initial conditions к Resume from a workspace variable.
Steady-state solution to start from, ssVar к переменной рабочей области, которую вы задали на шаге 3. В данном примере установите его на dlcSS35mph.

Нажмите Apply.
Запустите симуляцию.
Исследуйте результаты. Симуляция запускается в установившейся рабочей точке с транспортного средства при целевой скорости 35 mph. Маневр транспортного средства занимает ~5 с 7 с времени симуляции. Это - 18 с меньше, чем исходное время симуляции.
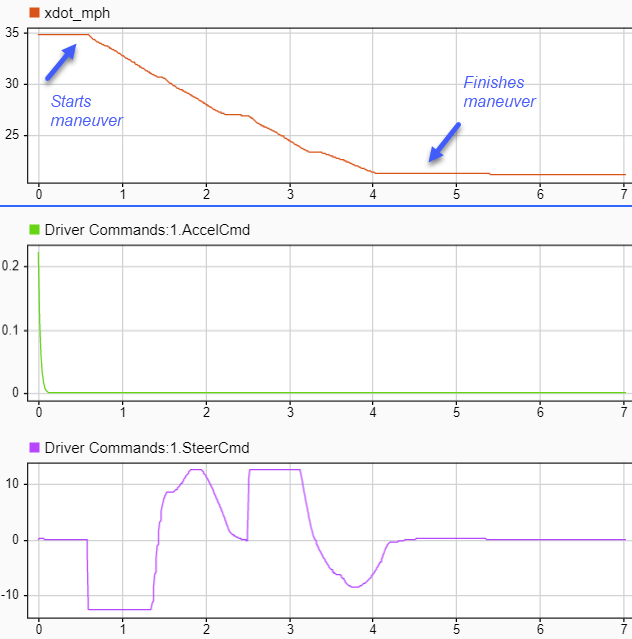
Lane Change Reference Generator
