Оцените объектные скорости
Computer Vision Toolbox / Analysis & Enhancement
Блок Optical Flow оценивает направление и скорость объектного движения между двумя изображениями или между одним видеокадром к другой системе координат с помощью или Рога-Schunck или метода Лукаса-Кэнэйда.
Типы данных |
|
Многомерные сигналы |
|
Сигналы переменного размера |
|
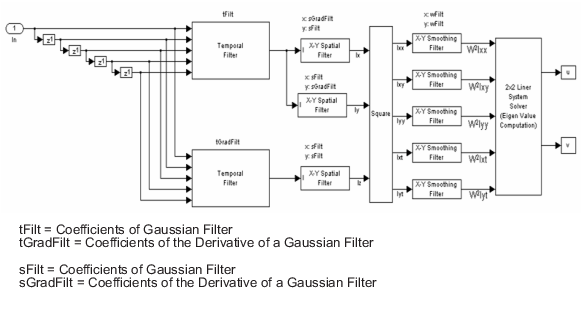
Если вы устанавливаете временный фильтр градиента к Derivative of Gaussian, u и v решены с помощью этих шагов.
Вычислить и .
Используйте Гауссов фильтр, чтобы выполнить временную фильтрацию. Задайте временные характеристики фильтра, такие как стандартное отклонение и количество коэффициентов фильтра, при помощи параметра Number of frames to buffer for temporal smoothing.
Используйте Гауссов фильтр и производную Гауссова фильтра, чтобы сглаживать изображение при помощи пространственной фильтрации. Задайте стандартное отклонение и длину фильтра сглаживания изображений при помощи параметра Standard deviation for image smoothing filter.
Вычислить между изображениями 1 и 2.
Используйте производную Гауссова фильтра, чтобы выполнить временную фильтрацию. Задайте временные характеристики фильтра, такие как стандартное отклонение и количество коэффициентов фильтра, при помощи параметра Number of frames to buffer for temporal smoothing.
Используйте фильтр, описанный на шаге 1b, чтобы выполнить пространственную фильтрацию на выходе временного фильтра.
Сглаживайте компоненты градиента, , , и , при помощи фильтра сглаживания градиента. Используйте параметр Standard deviation for gradient smoothing filter, чтобы задать стандартное отклонение и количество коэффициентов фильтра для фильтра сглаживания градиента.
Решите линейные уравнения 2 на 2 для каждого пикселя с помощью этого метода:
Если
затем собственные значения A
Когда блок находит собственные значения, он сравнивает их с порогом, , это соответствует значению, вы вводите для параметра Threshold for noise reduction. Результаты попадают в один из следующих случаев.
Случай 1: и
A несингулярен, таким образом, блок решает систему уравнений при помощи Правила Крамера.
Случай 2: и
A сингулярен (необратимый), таким образом, блок нормирует поток градиента, чтобы вычислить u и против.
Случай 3: и
оптический поток, u и v, 0.
Block Matching | Gaussian Pyramid | opticalFlow | opticalFlowHS | opticalFlowLK | opticalFlowLKDoG

