Отобразите местоположение и ориентацию меток осей
[ отображает ориентацию и местоположение источника originLabel,xLabel,yLabel] = drawImageAxesLabels(detectorObj,imagePoints)originLabel и X - и Y - подписи по осям xLabel и yLabel из кругового шаблона сетки, обнаруженного в изображениях, представленных в Camera Calibrator и приложениях Stereo Camera Calibrator.
Если вы не реализуете эту функцию, или если возвращенные значения пусты, то функция не представляет источник или метки осей в изображении.
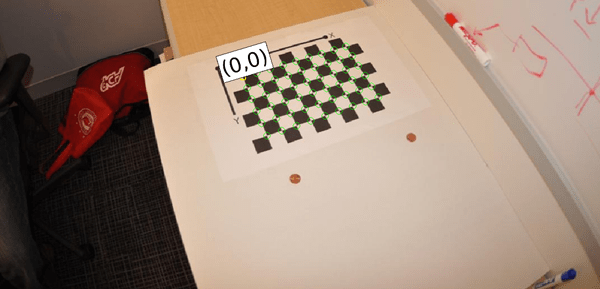
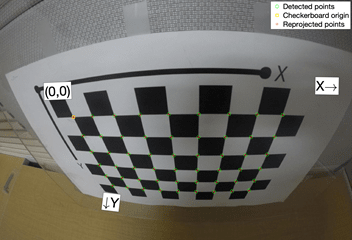
Используйте drawImageAxesLabels функция, чтобы идентифицировать и пометить ориентацию и местоположение для источника и X - и Y - подписи по осям обнаруженной сетки шаблона в изображении. Например:
Используйте этот шаблон функции, который включает использование drawImageAxesLabels возразите функции, чтобы вычислить ориентацию и местоположение источника обнаруженного калибровочного шаблона в изображении. Функция не использует X - и Y - метки. Функция включает и программируемые рабочие процессы и рабочие процессы приложения для обнаружения точек.
function [originLabel,xLabel,yLabel] = drawImageAxesLabels(this,imagePoints) numBoardRows = this.BoardSize(1) - 1; numBoardCols = this.BoardSize(2) - 1; % Reshape checkerboard corners to boardSize-shaped array boardCoordsX = reshape(imagePoints(:,1),[numBoardRows numBoardCols]); boardCoordsY = reshape(imagePoints(:,2),[numBoardRows numBoardCols]); boardCoords = cat(3,boardCoordsX,boardCoordsY); % Origin label (check if the origin location is inside the image) if ~isnan(boardCoordsX(1,1)) p1 = boardCoords(1,1,:); refPointIdx = find(~isnan(boardCoordsX(:,1)),2); p2 = boardCoords(refPointIdx(2),1,:); refPointIdx = find(~isnan(boardCoordsX(1,:)),2); p3 = boardCoords(1,refPointIdx(2),:); [loc, theta] = getAxesLabelPosition(p1,p2,p3); originLabel.Location = loc; originLabel.Orientation = theta; else originLabel = struct; end % X-axis and Y-axis labels xLabel = struct('Orientation',[],'Location',[]); yLabel = struct('Orientation',[],'Location',[]); %-------------------------------------------------------------- % p1+v % \ % \ v1 % p1 ------ p2 % | % v2 | % | % p3 function [loc, theta] = getAxesLabelPosition(p1,p2,p3) v1 = p3 - p1; theta = -atan2d(v1(2),v1(1)); v2 = p2 - p1; v = -v1 - v2; d = hypot(v(1),v(2)); minDist = 40; if d < minDist v = (v/d) * minDist; end loc = p1 + v; end end