Идеал автоматизировал механическую коробку передач
Powertrain Blockset / Передача / Системы Передачи
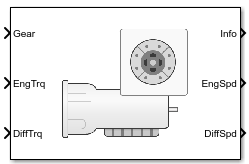
Блок Automated Manual Transmission реализует автоматизированную передачу идеала (AMT). AMT является механической коробкой передач с дополнительными приводами и электронным блоком управления (ECU), чтобы отрегулировать муфту и выбор механизма на основе команд от диспетчера. Количество механизмов задано через целочисленный вектор с соответствующими передаточными отношениями, инерцией, вязким затуханием и коэффициентами полезного действия. Муфта и уровни обязательства синхронизации являются линейными и корректируемыми.
Используйте блок для:
Полная калибровка мощности и крутящего момента
Определение передаточного отношения влияет на экономию топлива и эффективность
Чтобы определить вращательную скорость карданного вала и крутящий момент реакции, блок Automated Manual Transmission вычисляет:
Сожмите тупик и сожмите трение
Заблокированная вращательная динамика
Разблокированная вращательная динамика
Задавать вычисление КПД блока, для Efficiency factors, избранной любой из этих опций.
| Установка | Блокируйте реализацию |
|---|---|
Gear only | КПД определил из 1D интерполяционная таблица, которая является функцией механизма. |
Gear, input torque, input speed, and temperature | КПД определил из 4D интерполяционная таблица, которая является функцией:
|
AMT поставляет крутящий момент карданного вала постоянно путем управления сигналами давления от муфты. Если вы выбираете параметр Control type Ideal integrated controller, блок генерирует идеализированные сигналы давления муфты. Чтобы использовать ваши собственные управляющие сигналы муфты, выберите параметр Control type External control.
На основе условия тупика муфты блок реализует одну из этих моделей трения.
| Если | Сожмите условие | Модель трения |
|---|---|---|
| Разблокированный | ||
| Заблокированный |
Tf = Ts |
Уравнения используют эти переменные.
| ωt | Выведите скорость карданного вала |
| ωi | Введите скорость карданного вала |
| ωd | Скорость карданного вала |
Вязкое затухание | |
| Fc | Прикладывавшая сила муфты |
| N | Занятый механизм |
Фрикционный крутящий момент | |
Кинетический фрикционный крутящий момент | |
Статический фрикционный крутящий момент | |
Эффективный радиус муфты | |
Кольцевой диск внешний радиус | |
Кольцевой диск внутренний радиус | |
| μs | Коэффициент статического трения |
| μk | Коэффициент кинетического трения |
Чтобы смоделировать вращательную динамику, когда муфта заблокирована, блок реализует эти уравнения.
Блок определяет входной крутящий момент, Ti, посредством дифференцирования.
Уравнения используют эти переменные.
| ωi | Введите скорость карданного вала |
| ωd | Скорость карданного вала |
| N | Занятый механизм |
| bN | Занятый механизм вязкое затухание |
| JN | Занятая инерция механизма |
| ηN | Занятый КПД механизма |
| Td | Крутящий момент карданного вала |
| Ti | Примененный входной крутящий момент |
Чтобы смоделировать вращательную динамику, когда муфта разблокирована, блок реализует это уравнение.
где:
| ωd | Скорость карданного вала |
| N | Занятый механизм |
| bN | Занятый механизм вязкое затухание |
| JN | Занятая инерция механизма |
| Td | Крутящий момент карданного вала |
| Ti | Примененный входной крутящий момент |
Для учета степени блок реализует эти уравнения.
| Сигнал шины | Описание | Переменная | Уравнения | ||
|---|---|---|---|---|---|
|
|
| Мощность двигателя | Peng | |
PwrDiffrntl | Дифференциальная степень | Pdiff | |||
|
| PwrEffLoss | Потеря механической энергии | Peffloss | ||
PwrDampLoss | Потеря затухания механического устройства | Pdamploss | |||
PwrCltchLoss | Сожмите потери мощности | Pmech | Когда заблокировано: Когда разблокировано: | ||
|
| PwrStoredTrans | Изменение уровня во вращательной кинетической энергии | Pstr | Когда заблокировано: Когда разблокировано: | |
Уравнения используют эти переменные.
| bN | Занятый механизм вязкое затухание |
| JN | Занятый механизм вращательная инерция |
| Jin | Маховик вращательная инерция |
| ηN | Занятый КПД механизма |
| N | Занятое передаточное отношение |
| Ti | Примененный входной крутящий момент, обычно от коленчатого вала механизма или двойного массового демпфера маховика |
| Td | Прикладной крутящий момент нагрузки, обычно от дифференциала или карданного вала |
| ωd | Начальный входной карданный вал вращательная скорость |
| ωi, ώi | Прикладной карданный вал угловая скорость и ускорение |
AMT Controller | Dual Clutch Transmission | Continuously Variable Transmission | Ideal Fixed Gear Transmission

