Идеал зафиксировал передачу механизма без муфты или синхронизации
Powertrain Blockset / Передача / Системы Передачи
Vehicle Dynamics Blockset / Трансмиссия / Передача
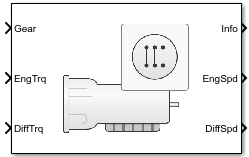
Ideal Fixed Gear Transmission реализует идеализированную передачу фиксированного механизма без муфты или синхронизации. Используйте блок, чтобы смоделировать полное передаточное отношение и потери мощности, когда вам не будет нужна подробная модель передачи, например, в калибровке компонента, экономии топлива и исследованиях эмиссии. Блок реализует модель передачи с минимальной параметризацией или вычислительной стоимостью.
Задавать вычисление КПД блока, для Efficiency factors, избранной любой из этих опций.
| Установка | Блокируйте реализацию |
|---|---|
Gear only | КПД определил из 1D интерполяционная таблица, которая является функцией механизма. |
Gear, input torque, input speed, and temperature | КПД определил из 4D интерполяционная таблица, которая является функцией:
|
Блок использует это уравнение, чтобы определить динамику передачи:
Блок фильтрует сигнал команды механизма:
Когда Initial gear number, G_o равен 0, начальный механизм нейтрален. Блок использует эти параметры, чтобы разъединить входной маховик от нисходящего левереджа.
Initial input velocity, omega_o
Initial neutral input velocity, omegainN_o
Блок использует эти уравнения для нейтральной скорости механизма и маховика.
Для учета степени блок реализует эти уравнения.
| Сигнал шины | Описание | Переменная | Уравнения | ||
|---|---|---|---|---|---|
|
|
| Мощность двигателя | Peng | |
PwrDiffrntl | Дифференциальная степень | Pdiff | |||
|
| PwrEffLoss | Потеря механической энергии | Peffloss | ||
PwrDampLoss | Потеря затухания механического устройства | Pdamploss | |||
|
| PwrStoredTrans | Изменение уровня во вращательной кинетической энергии | Pstr | ||
Уравнения используют эти переменные.
| bN | Занятый механизм вязкое затухание |
| JN | Занятый механизм вращательная инерция |
| JF | Маховик вращательная инерция |
| ηN | Занятый КПД механизма |
| G | Занятый номер механизма |
| Gcmd | Номер механизма, чтобы участвовать |
| N | Занятое передаточное отношение |
| Ti | Примененный входной крутящий момент, обычно от коленчатого вала механизма или двойного массового демпфера маховика |
| To | Прикладной крутящий момент нагрузки, обычно от дифференциала или карданного вала |
| ωo | Начальный входной карданный вал вращательная скорость |
| ωi, ώi | Прикладной карданный вал угловая скорость и ускорение |
| ωNo | Начальный нейтральный механизм ввел вращательную скорость |
| ωneutral | Нейтральный карданный вал механизма вращательная скорость |
| τs | Переключите постоянную времени |
Automated Manual Transmission | Dual Clutch Transmission | Continuously Variable Transmission
