Эталонные данные для меток ROI
ROILabelData достоверные данные объектно-ориентированной памяти для видимой области (ROI) помечают определения для каждого сигнала в groundTruthMultisignal объект.
Когда вы экспортируете groundTruthMultisignal объект от сеанса приложения Ground Truth Labeler, ROILabelData свойство экспортируемого объекта хранит метки ROI как ROILabelData объект. Создать ROILabelData возразите программно, используйте vision.labeler.labeldata.ROILabelData функция (описанный здесь).
roiLabelData = vision.labeler.labeldata.ROILabelData(signalNames,labelData)roiLabelData, содержит свойства с именами сигнала, перечисленными в signalNames. Эти свойства хранят соответствующие данные о метке ROI, заданные labelData.
signalNames — Имена сигналаИмена сигнала в виде массива строк. Задайте имена всех сигналов, существующих в groundTruthMultisignal объект вы создаете. Можно получить имена сигнала от существующего groundTruthMultisignal объект путем доступа к DataSource свойство того объекта. Используйте эту команду и замените gTruth с именем вашего groundTruthMultisignal переменная объекта.
gTruth.DataSource.SignalName
В экспортируемом groundTruthMultisignal объект, ROILabelData объект содержит свойство данных метки для каждого сигнала, даже если некоторые сигналы не имеют данных о метке ROI.
Свойства созданного ROILabelData объекту задал имена signalNames.
Пример: ["video_01_city_c2s_fcw_10s" "lidarSequence"]
labelData — Данные о метке ROI для каждого сигналаДанные о метке ROI для каждого сигнала в виде массива ячеек расписаний. Каждое расписание в массиве ячеек содержит данные для сигнала в соответствующем положении signalNames входной параметр. ROILabelData объектно-ориентированная память каждое расписание в свойстве, которое имеет то же имя как тот сигнал.
Формат расписания для каждого сигнала зависит от данных из groundTruthMultisignal возразите, что вы экспортировали или создаете.
Каждое расписание содержит один столбец на определение метки, сохраненное в LabelDefinitions свойство groundTruthMultisignal объект. Пометьте определения, которые не поддерживает тип сигнала, исключены. Например, предположите, что вы задаете Line Метка ROI под названием 'lane'. Расписание для сигнала облака точек лидара не включает lane столбец, потому что эти сигналы не поддерживают Line Метки ROI. В DataSource свойство groundTruthMultisignal объект, SignalType свойство каждого источника данных перечисляет допустимые типы сигнала.
Высота расписания задана количеством меток времени в сигнале. В DataSource свойство groundTruthMultisignal объект, Timestamp свойство каждого источника данных перечисляет метки времени сигнала.
Для каждого определения метки все метки ROI отметили в этом, метки времени объединены в отдельную ячейку в таблице. Считайте данные о метке ROI для видеосигнала сохраненными в groundTruthMultisignal объект, gTruth. В каждой метке времени, car содержит три метки, truck содержит одну метку и lane содержит две метки.
gTruth.ROILabelData.video_01_city_c2s_fcw_10s
ans =
5×4 timetable
Time car truck lane
_________ ____________ ____________ ____________
0 sec {3×4 double} {1×4 double} {2×1 cell }
0.05 sec {3×4 double} {1×4 double} {2×1 cell }
0.1 sec {3×4 double} {1×4 double} {2×1 cell }
0.15 sec {3×4 double} {1×4 double} {2×1 cell }
0.2 sec {3×4 double} {1×4 double} {2×1 cell }Формат устройства хранения данных для данных о метке ROI зависит от типа метки.
| Маркируйте Type | Формат устройства хранения данных для меток в каждой метке времени |
|---|---|
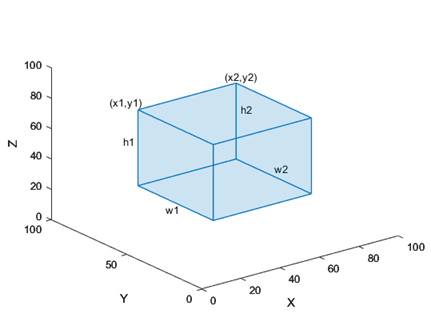
labelType.Rectangle |
|
|
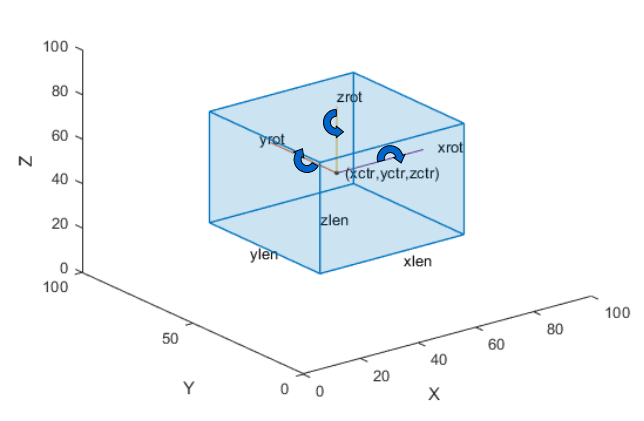
Рисунок показывает, как эти значения определяют положение кубоида.
|
|
Рисунок показывает, как эти значения определяют положение кубоида.
|
labelType.Line |
|
labelType.PixelLabel | Данные о метке для всех пиксельных определений метки хранятся в одном M-by-1 |
labelType.Polygon |
|
labelType.Custom | Метки хранятся точно так же, как они заданы в расписании. Если вы импортируете |
Если данные о метке ROI включают подметки или атрибуты, то метки в каждой метке времени должны быть заданы как структуры вместо этого. Структура включает эти поля.
| Маркируйте Structure Field | Описание | ||||||
|---|---|---|---|---|---|---|---|
Position | Положения родительского меток в данной метке времени Формат | ||||||
AttributeName1,...,AttributeNameN | Атрибуты родительских меток Каждая заданная подметка имеет свое собственное поле, где имя поля соответствует названию атрибута. Значение атрибута является вектором символов для | ||||||
SublabelName1,...,SublabelNameN | Подметки родительских меток Каждая заданная подметка имеет свое собственное поле, где имя поля соответствует имени подметки. Значение каждого поля подметки является структурой, содержащей данные для всех отмеченных подметок с тем именем в данной метке времени. Эта таблица описывает формат этой структуры подметки.
|