В этом примере показано, как создать ведущий сценарий, в котором транспортное средство управляет наоборот при помощи приложения Driving Scenario Designer. В этом примере вы задаете транспортное средство, которое завершает поворот с тремя точками.
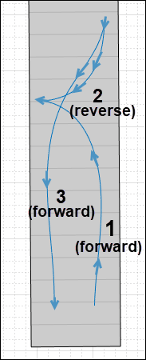
three-point turn является основным ведущим маневром для того, чтобы изменить направления на дороге. Три сегмента поворота с тремя точками состоят из этих движений:
Диск вперед и поворот к противоположной стороне дороги.
Управляйте наоборот при возвращении к исходной стороне дороги.
Диск вперед к противоположной стороне дороги, чтобы завершить изменение направления.
Можно использовать противоположные движения спроектировать более комплексные сценарии для тестирования автоматизированных ведущих алгоритмов.
Откройте приложение Driving Scenario Designer.
drivingScenarioDesigner
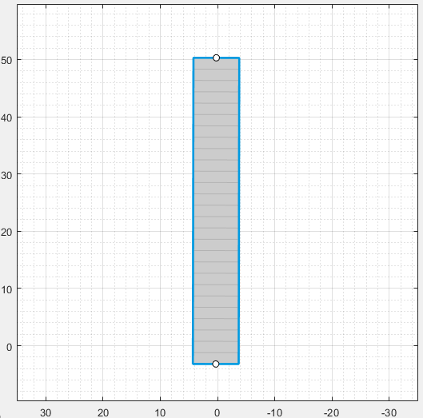
Добавьте прямую дорогу к сценарию. Щелкните правой кнопкой по панели Scenario Canvas и выберите Add Road. Расширьте дорогу к верхней части холста, пока это не будет приблизительно 50 метров длиной. Дважды кликните, чтобы передать дорогу к холсту.
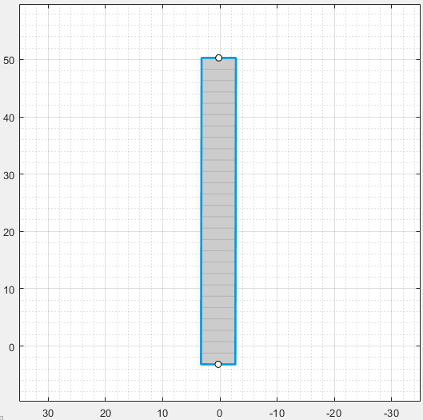
Расширьте ширину дороги, чтобы оставить достаточно комнаты для транспортного средства, чтобы завершить поворот с тремя точками. На левой панели, на вкладке Roads, Width (m) увеличения от 6 к 8.
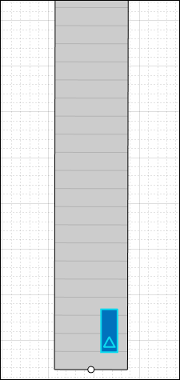
Добавьте транспортное средство в дорогу. Щелкните правой кнопкой по правому нижнему углу дороги и выберите Add Car. Увеличьте масштаб транспортного средства и первой половины дороги, которая является, где транспортное средство выполнит поворот с тремя точками.
Задайте траекторию для транспортного средства, чтобы завершить поворот с тремя точками.
Щелкните правой кнопкой по транспортному средству и выберите Add Forward Waypoints. Указатель отображается (x, y) позиция по холсту и направлению движения, что автомобиль переместится, когда вы задаете waypoints.
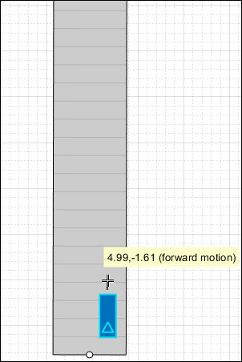
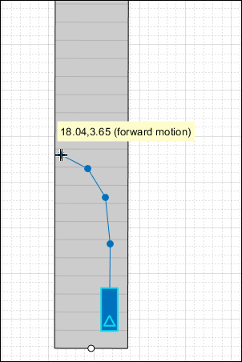
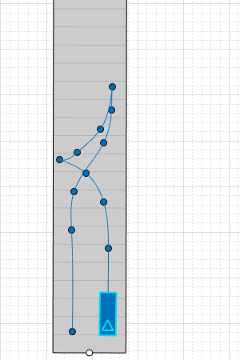
Задайте первый сегмент поворота с тремя точками. Щелкните, чтобы добавить waypoints, которые поворачиваются к левой стороне дороги.
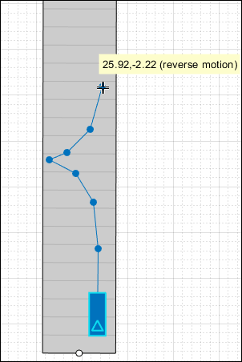
Задайте второй сегмент поворота с тремя точками. Нажмите Ctrl+R, чтобы переключиться на определение реверса waypoints. Затем щелкните, чтобы добавить waypoints, которые возвращаются к правой стороне дороги.
Задайте третий сегмент поворота с тремя точками. Нажмите Ctrl+F, чтобы переключиться назад на определение прямого waypoints. Затем щелкните, чтобы добавить waypoints, которые возвращаются к левой стороне дороги, смежный с первым задал waypoint.
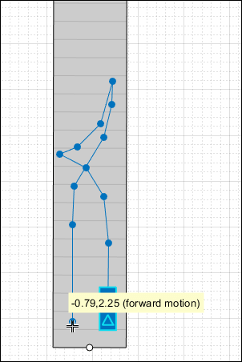
Нажмите Enter, чтобы передать waypoints холсту.
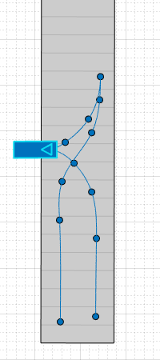
Запустите симуляцию. Чтобы просмотреть направление, что автомобиль перемещается на панели инструментов приложения, выбирают Display> Show actor pose indicator during simulation.
Когда симуляция запускается, транспортное средство кратко останавливается между каждой точкой в повороте с тремя точками. При переключении между прямыми и противоположными движениями в траекторию приложение автоматически устанавливает значение v (m/s) в waypoint, где переключатель происходит с 0.
Чтобы подстроить траекторию, установите определенные углы ориентации рыскания для транспортного средства достигать в определенном waypoints. Например, когда транспортное средство начинает свою противоположную траекторию движения, предположите, что вы хотите, чтобы транспортное средство было в точно углу в 90 градусов от того, где это запустилось.
Во-первых, определите ID waypoint, где транспортное средство начинает это противоположное движение путем перемещения указателя через это waypoint. Затем в таблице Waypoints, Speeds, Wait Times, and Yaw на левой панели, устанавливает значение yaw (deg) соответствующей строки к 90. Например, если транспортное средство начинает свое противоположное движение в waypoint 5, обновите пятую строку столбца yaw (deg).
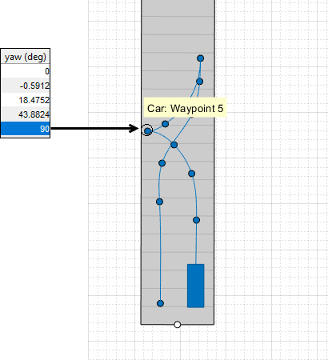
В процессе моделирования транспортное средство теперь превращено точно 90 градусов того, где оно началось. Чтобы очистить ранее установленное значение рыскания, щелкните правой кнопкой по waypoint и выберите Restore Default Yaw. Можно также очистить все установленные значения рыскания путем щелчка правой кнопкой по транспортному средству и выбора Restore Default Yaws.
Чтобы работать с предварительно созданными сценариями, которые используют противоположные движения и повороты с заданными значениями рыскания, см. предварительно созданные сценарии автономного экстренного торможения (AEB), описанные в Евро NCAP Управление Сценариями в Driving Scenario Designer.
