Приложение Driving Scenario Designer обеспечивает библиотеку предварительно созданных сценариев, представляющих европейскую Новую Автомобильную Программу Оценки (Евро NCAP®) протестируйте протоколы. Приложение включает сценарии для тестирования автономного экстренного торможения (AEB), хранения аварийной полосы (ELK) и систем маршрута сохраняет, помогают (LKA).
Чтобы начать, откройте приложение Driving Scenario Designer. В MATLAB® командная строка, введите drivingScenarioDesigner.
В приложении Евро сценарии NCAP хранятся как MAT-файлы и организованный в папки. Чтобы открыть Евро файл NCAP, на панели инструментов приложения, выбирают Open> Prebuilt Scenario. PrebuiltScenarios папка открывается, который включает подпапки для всех предварительно созданных сценариев, доступных в приложении (см. также Предварительно созданные Ведущие Сценарии в Driving Scenario Designer).
Дважды кликните папку EuroNCAP, и затем выберите сценарий Euro NCAP из одной из этих подпапок.
Эти сценарии спроектированы, чтобы протестировать системы автономного экстренного торможения (AEB). Системы AEB предупреждают драйверы о предстоящих столкновениях и автоматически применяют тормоза, чтобы предотвратить столкновения или уменьшать удар столкновений. Некоторые системы AEB готовят транспортное средство и системы сдержанности для удара. Таблица описывает подмножество сценариев AEB.
| FileName | Описание |
|---|---|
AEB_Bicyclist_Longitudinal_25width.mat | Автомобиль, оборудованный датчиком сталкивается с велосипедистом, который является перед ним. Перед столкновением велосипедист и автомобиль, оборудованный датчиком перемещаются в том же направлении вдоль продольной оси. Во время столкновения велосипед составляет 25% пути через ширину автомобиля, оборудованного датчиком.
Дополнительные сценарии варьируются местоположение велосипеда во время столкновения. |
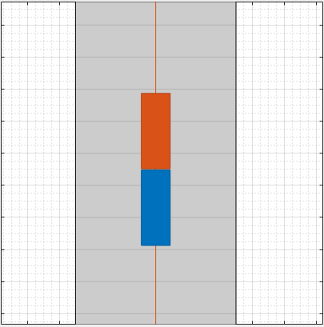
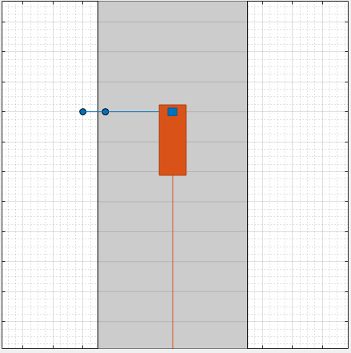
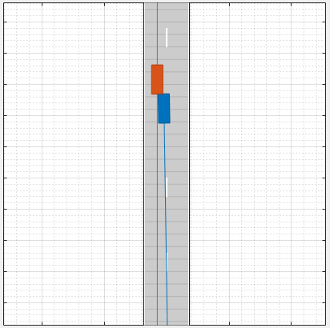
AEB_CCRb_2_initialGap_12m.mat | Сценарий торможения задней части от автомобиля к автомобилю (CCRb), где автомобиль, оборудованный датчиком совершает заднее столкновение с тормозящим транспортным средством. Тормозящее транспортное средство начинает замедляться на уровне 2 м/с2. Начальный разрыв между автомобилем, оборудованным датчиком и тормозящим транспортным средством составляет 12 м.
Дополнительные сценарии варьируются объем замедления и начального разрыва между автомобилем, оборудованным датчиком и тормозящим транспортным средством. |
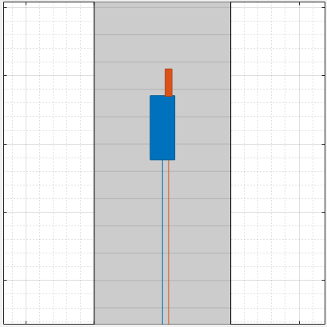
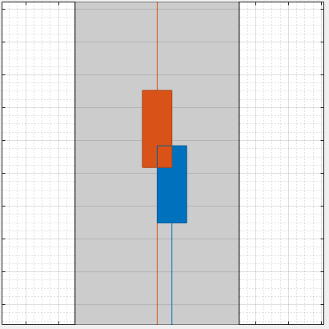
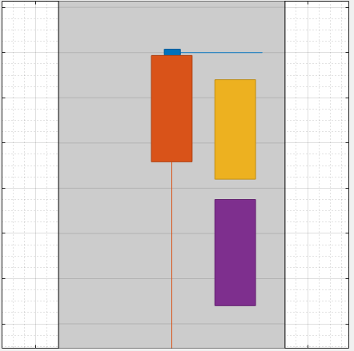
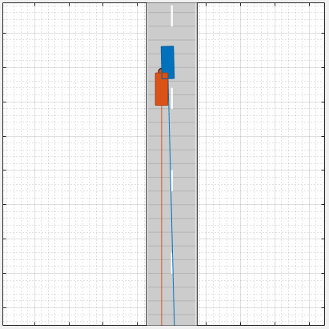
AEB_CCRm_50overlap.mat | Сценарий перемещения задней части от автомобиля к автомобилю (CCRm), где автомобиль, оборудованный датчиком совершает заднее столкновение с движущимся транспортным средством. Во время столкновения автомобиль, оборудованный датчиком перекрывается с 50% ширины движущегося транспортного средства.
Дополнительные сценарии варьируются сумма перекрытия и местоположение перекрытия. |
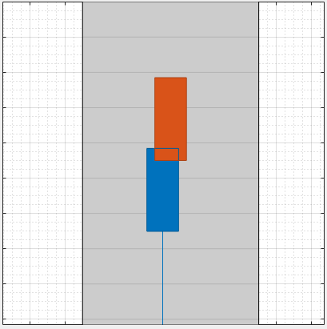
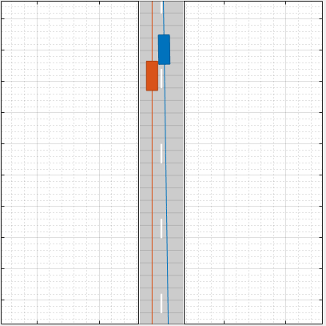
AEB_CCRs_-75overlap.mat | Сценарий стационарной задней части от автомобиля к автомобилю (CCRs), где автомобиль, оборудованный датчиком совершает заднее столкновение со стационарным транспортным средством. Во время столкновения автомобиль, оборудованный датчиком перекрывается с-75% ширины стационарного транспортного средства. Когда автомобиль, оборудованный датчиком слева от другого транспортного средства, перекрытие процента отрицательно.
Дополнительные сценарии варьируются сумма перекрытия и местоположение перекрытия. |
AEB_Pedestrian_Farside_50width.mat | Автомобиль, оборудованный датчиком сталкивается с пешеходом, который перемещается из левой стороны дороги, какой Евро тестовые протоколы NCAP называют far side. Эти протоколы принимают, что транспортные средства перемещаются на правой стороне дороги. Поэтому левая сторона дороги является стороной, самой дальней от автомобиля, оборудованного датчиком. Во время столкновения пешеход - 50% пути через ширину автомобиля, оборудованного датчиком.
Дополнительные сценарии варьируются местоположение пешехода во время столкновения. |
AEB_PedestrianChild_Nearside_50width.mat | Автомобиль, оборудованный датчиком сталкивается с пешеходом, который перемещается из правой стороны дороги, какой Евро тестовые протоколы NCAP называют near side. Эти протоколы принимают, что транспортные средства перемещаются на правой стороне дороги. Поэтому правая сторона дороги является стороной, самой близкой к автомобилю, оборудованному датчиком. Во время столкновения пешеход - 50% пути через ширину автомобиля, оборудованного датчиком.
|
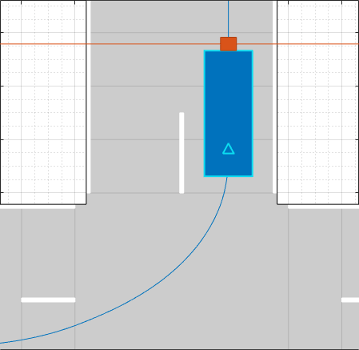
AEB_PedestrianTurning_Farside_50width.mat | Автомобиль, оборудованный датчиком поворачивается на пересечении и сталкивается с пешеходом, который перемещается параллель с левой стороной или противоположная сторона, транспортного средства в начале симуляции. Во время столкновения пешеход - 50% пути через ширину автомобиля, оборудованного датчиком.
В дополнительном сценарии пешеход имеет с другой стороны пересечение и перемещается параллель с правой стороной, или около стороны, транспортного средства в начале симуляции. |
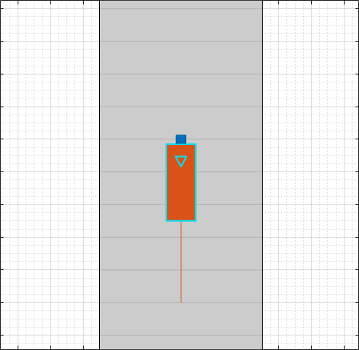
Reverse_AEB_Pedestrian_Stationary_50width.mat | Автомобиль, оборудованный датчиком перемещается наоборот и сталкивается со стационарным пешеходом. Во время столкновения пешеход - 50% пути через ширину автомобиля, оборудованного датчиком.
В дополнительном сценарии, перед столкновением, пешеход перемещается из правой стороны, или около стороны, прямой системы отсчета транспортного средства. |
Эти сценарии спроектированы, чтобы протестировать системы хранения аварийной полосы (ELK). Системы ELK предотвращают столкновения путем предупреждения драйверов о предстоящих, неумышленных отъездах маршрута. Таблица описывает подмножество сценариев ELK.
| FileName | Описание |
|---|---|
ELK_FasterOvertakingVeh_Intent_Vlat_0.5.mat | Автомобиль, оборудованный датчиком намеренно перестраивается на другую полосу и сталкивается с более быстрым, настигающим транспортным средством, которое находится в другом маршруте. Автомобиль, оборудованный датчиком перемещается в поперечной скорости 0,5 м/с.
Дополнительные сценарии варьируются поперечная скорость и было ли изменение маршрута намеренным или неумышленным. |
ELK_OncomingVeh_Vlat_0.3.mat | Автомобиль, оборудованный датчиком непреднамеренно перестраивается на другую полосу и сталкивается с надвигающимся транспортным средством, которое находится в другом маршруте. Автомобиль, оборудованный датчиком перемещается в поперечной скорости 0,3 м/с.
Дополнительные сценарии варьируются поперечная скорость. |
ELK_OvertakingVeh_Unintent_Vlat_0.3.mat | Автомобиль, оборудованный датчиком непреднамеренно перестраивается на другую полосу, обгоняет транспортное средство в другом маршруте и сталкивается с тем транспортным средством. Автомобиль, оборудованный датчиком перемещается в поперечной скорости 0,3 м/с.
Дополнительные сценарии варьируются поперечная скорость и было ли изменение маршрута намеренным или неумышленным. |
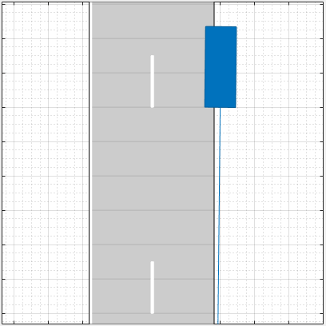
ELK_RoadEdge_NoBndry_Vlat_0.2.mat | Автомобиль, оборудованный датчиком непреднамеренно перестраивается на другую полосу и заканчивается на дорожном ребре. Дорожное ребро не имеет никаких маркировок контура маршрута. Автомобиль, оборудованный датчиком перемещается в поперечной скорости 0,2 м/с.
Дополнительные сценарии варьируются поперечная скорость и имеет ли дорожное ребро твердый контур, подчеркнутый штриховой линией контур или никакой контур. |
Эти сценарии спроектированы, чтобы протестировать системы маршрута сохраняет, помогают (LKA). Системы LKA обнаруживают неумышленные отъезды маршрута и автоматически настраивают держащийся угол транспортного средства, чтобы остаться в контурах маршрута. Таблица приводит подмножество сценариев LKA.
| Имена файлов | Описание |
|---|---|
LKA_DashedLine_Solid_Left_Vlat_0.5.mat | Автомобиль, оборудованный датчиком непреднамеренно вылетает от маршрута, который подчеркивается штриховой линией слева и тело справа. Автомобиль отбывает из маршрута из покинутой (пунктирной) стороны, перемещающейся в поперечной скорости 0,5 м/с.
Дополнительные сценарии варьируются поперечная скорость и является ли пунктирный маршрут, который пересекает транспортное средство, слева или право. |
LKA_DashedLine_Unmarked_Right_Vlat_0.5.mat | Автомобиль, оборудованный датчиком непреднамеренно вылетает от маршрута, который подчеркивается штриховой линией справа и не отмеченный слева. Автомобиль отбывает, маршрут от права (подчеркнул штриховой линией) сторону, перемещающуюся в поперечной скорости 0,5 м/с.
Дополнительные сценарии варьируются поперечная скорость и является ли пунктирный маршрут, отмечающий, который пересекает транспортное средство, слева или право. |
LKA_RoadEdge_NoBndry_Vlat_0.5.mat | Автомобиль, оборудованный датчиком непреднамеренно вылетает от маршрута и заканчивается на дорожном ребре. Дорожное ребро не имеет никаких маркировок контура маршрута. Автомобиль перемещается в поперечной скорости 0,5 м/с.
Дополнительные сценарии варьируются поперечная скорость. |
LKA_RoadEdge_NoMarkings_Vlat_0.5.mat | Автомобиль, оборудованный датчиком непреднамеренно вылетает от маршрута и заканчивается на дорожном ребре. Дорога не имеет никаких маркировок маршрута. Автомобиль перемещается в поперечной скорости 0,5 м/с.
Дополнительные сценарии варьируются поперечная скорость. |
LKA_SolidLine_Dashed_Left_Vlat_0.5.mat | Автомобиль, оборудованный датчиком непреднамеренно вылетает от маршрута, который тверд слева и подчеркнутый штриховой линией справа. Автомобиль отбывает из маршрута из покинутой (твердой) стороны, перемещающейся в поперечной скорости 0,5 м/с.
Дополнительные сценарии варьируются поперечная скорость и является ли твердый маршрут, отмечающий, который пересекает транспортное средство, слева или право. |
LKA_SolidLine_Unmarked_Right_Vlat_0.5.mat | Автомобиль, оборудованный датчиком непреднамеренно вылетает от маршрута, который является телом справа и не отмеченный слева. Автомобиль отбывает из маршрута из правильной (твердой) стороны, перемещающейся в поперечной скорости 0,5 м/с.
Дополнительные сценарии варьируются поперечная скорость и является ли твердый маршрут, отмечающий, который пересекает транспортное средство, слева или право. |
По умолчанию, в Евро сценарии NCAP, автомобиль, оборудованный датчиком не содержит датчики. Если вы тестируете датчик транспортного средства на панели инструментов приложения, нажмите Add Camera или Add Radar, чтобы добавить датчик в автомобиль, оборудованный датчиком. Затем на вкладке Sensor настройте параметры датчиков, чтобы совпадать с вашей моделью датчика. Если вы тестируете датчик камеры, чтобы позволить камере обнаружить маршруты, расширить раздел Detection Parameters и установить Detection Type на Lanes & Objects.
Можно также настроить параметры дорог и агентов в сценарии. Например, от вкладки Actors слева, можно сменить положение или скорость автомобиля, оборудованного датчиком или других агентов. От вкладки Roads можно изменить ширину маршрутов или тип маркировок маршрута.
Чтобы сгенерировать обнаружения от любых добавленных датчиков, нажмите Run. Когда сценарий запускается, Ego-Centric View отображает сценарий с точки зрения автомобиля, оборудованного датчиком. Bird’s-Eye Plot отображает обнаружения.
Экспортируйте обнаружения.
Чтобы экспортировать данные о датчике в рабочее пространство MATLAB, на панели инструментов приложения, выбирают Export> Export Sensor Data. Назовите переменную рабочей области и нажмите OK. Приложение сохраняет данные о датчике, когда структура, содержащая данные о датчике, такие как агент, позирует, обнаружения объектов и обнаружения маршрута на каждом временном шаге.
Чтобы экспортировать функцию MATLAB, которая генерирует сценарий и его данные о датчике, выберите Export> Export MATLAB Function. Эта функция возвращает данные о датчике как структуру, сценарий как drivingScenario объект и модели датчика как Системные объекты. Путем изменения этой функции можно создать изменения исходного сценария. Для примера этого процесса смотрите, Создают Ведущие Изменения Сценария Программно.
Поскольку Евро, сценарии NCAP только для чтения, сохраняют копию ведущего сценария к новой папке. Чтобы сохранить файл сценария, на панели инструментов приложения, выбирают Save> Scenario File As.
Можно вновь открыть этот файл сценария из приложения. В качестве альтернативы в командной строке MATLAB, можно использовать этот синтаксис.
drivingScenarioDesigner(scenarioFileName)
drivingScenario объект. В командной строке MATLAB используйте этот синтаксис, где scenario имя экспортируемого объекта.drivingScenarioDesigner(scenario)
sensors объект датчика или массив ячеек таких объектов.drivingScenarioDesigner(scenario,sensors)
drivingScenario возразите в свою модель. Этот блок непосредственно не считывает данные о датчике. Чтобы добавить датчики, которые вы создали в приложении к модели Simulink, сгенерируйте модель, содержащую ваш сценарий и датчики путем выбора Export> Export Simulink Model. В модели сгенерированный блок Scenario Reader читает сценарий, и сгенерированные блоки датчика задают датчики.[1] Европейская новая автомобильная программа оценки. Евро протокол оценки NCAP - SA. Версия 8.0.2. Январь 2018.
[2] Европейская новая автомобильная программа оценки. Евро тестовый протокол NCAP AEB C2C. Версия 2.0.1. Январь 2018.
[3] Европейская новая автомобильная программа оценки. Евро тестовый протокол NCAP LSS. Версия 2.0.1. Январь 2018.
drivingScenario | drivingRadarDataGenerator | visionDetectionGenerator | lidarPointCloudGenerator | insSensor