Отфильтруйте выбросы с помощью идентификатора Хампеля
dsp.HampelFilter Система object™ обнаруживает и удаляет выбросы входного сигнала при помощи идентификатора Хампеля. Идентификатор Хампеля является изменением правила с тремя сигмами статистики, которая устойчива против выбросов. Для каждой выборки входного сигнала объект вычисляет медиану окна, состоявшего из текущей выборки и смежные выборки на каждой стороне текущей выборки. Len является длиной окна, которую вы задаете через WindowLength свойство. Объект также оценивает стандартное отклонение каждой выборки о ее медиане окна при помощи среднего абсолютного отклонения. Если выборка отличается от медианы больше, чем порог, умноженный на стандартное отклонение, фильтр заменяет выборку на медиану. Для получения дополнительной информации см. Алгоритмы.
Отфильтровать входной сигнал с помощью идентификатора Хампеля:
Создайте dsp.HampelFilter объект и набор его свойства.
Вызовите объект с аргументами, как будто это была функция.
Чтобы узнать больше, как Системные объекты работают, смотрите то, Что Системные объекты?
hampFilt = dsp.HampelFilterhampFilt, использование свойств по умолчанию.
hampFilt = dsp.HampelFilter(Len)WindowLength свойство к Len.
hampFilt = dsp.HampelFilter(Len, Lim)WindowLength свойство к Len и Threshold свойство к Lim.
hampFilt = dsp.HampelFilter(11,2);hampFilt = dsp.HampelFilter(Name,Value)Name,Value пары. Незаданные свойства имеют значения по умолчанию.
Чтобы использовать объектную функцию, задайте Системный объект как первый входной параметр. Например, чтобы выпустить системные ресурсы Системного объекта под названием obj, используйте этот синтаксис:
release(obj)
Отфильтруйте высокочастотный шум от шумного синусоидального сигнала с помощью фильтра Hampel. Сравните эффективность фильтра Hampel со средним фильтром.
Инициализация
Настройте dsp.HampelFilter и dsp.MedianFilter объект. Эти объекты используют метод раздвижного окна с длиной окна 7. Создайте осциллограф времени для того, чтобы просмотреть вывод.
Fs = 1000; hampFilt = dsp.HampelFilter(7); medFilt = dsp.MedianFilter(7); scope = timescope('SampleRate',Fs, ... 'TimeSpanOverrunAction','Scroll', ... 'TimeSpanSource','Property',... 'TimeSpan',1,'ShowGrid',true, ... 'LayoutDimensions',[3 1], ... 'NumInputPorts',3); scope.ActiveDisplay = 1; scope.Title = 'Signal + Noise'; scope.YLimits = [-1 3]; scope.ActiveDisplay = 2; scope.Title = 'Hampel Filter Output (Window Length = 7)'; scope.YLimits = [-1 1]; scope.ActiveDisplay = 3; scope.Title = 'Median Filter Output (Window Length = 7)'; scope.YLimits = [-1 1];
Отфильтруйте шумный Sine wave Используя окно длины 7
Сгенерируйте шумный синусоидальный сигнал с частотой 10 Гц. Примените фильтр Hampel и средний объект фильтра к сигналу. Просмотрите вывод на осциллографе времени.
FrameLength = 256; sine = dsp.SineWave('SampleRate',Fs,'Frequency',10,... 'SamplesPerFrame',FrameLength); for i = 1:500 hfn = 3 * (rand(FrameLength,1) < 0.02); x = sine() + 1e-2 * randn(FrameLength,1) + hfn; y1 = hampFilt(x); y2 = medFilt(x); scope(x,y1,y2); end release(scope)

Оба фильтра удаляют высокочастотный шум. Однако, когда вы увеличиваете длину окна, фильтр Hampel предпочтен. В отличие от среднего фильтра, фильтр Hampel сохраняет форму синусоиды даже с большими длинами окна.
Отфильтруйте шумный Sine wave Используя окно длины 37
Увеличьте длину окна обоих фильтры к 37. Отфильтруйте шумную синусоиду и просмотрите отфильтрованный вывод на осциллографе времени. Чтобы изменить длину окна фильтров, необходимо выпустить объекты фильтра в начале цикла обработки.
release(hampFilt); release(medFilt); hampFilt.WindowLength = 37; medFilt.WindowLength = 37; scope.ActiveDisplay = 1; scope.Title = 'Signal + Noise'; scope.ActiveDisplay = 2; scope.Title = 'Hampel Filter Output (Window Length = 37)'; scope.ActiveDisplay = 3; scope.Title = 'Median Filter Output (Window Length = 37)'; for i = 1:500 hfn = 3 * (rand(FrameLength,1) < 0.02); x = sine() + 1e-2 * randn(FrameLength,1) + hfn; y1 = hampFilt(x); y2 = medFilt(x); scope(x,y1,y2); end release(scope)

Средний фильтр сглаживает гребни и канавки синусоиды из-за средней операции по большому окну данных. Фильтр Hampel сохраняет форму сигнала, в дополнение к удалению выбросов.
Удалите высокочастотные выбросы из сигнала потоковой передачи использование dsp.HampelFilter Система object™.
Используйте dsp.MatFileReader Системный объект, чтобы считать файл MAT гироскопа. Файл содержит три столбца данных с каждым столбцом, содержащим 7 140 выборок. Эти три столбца представляют ось X, ось Y и данные оси z из датчика движения гироскопа. Выберите формат кадра 714 выборок так, чтобы каждый столбец данных содержал 10 систем координат. dsp.HampelFilter Системный объект использует длину окна 11. Создайте timescope объект просмотреть отфильтрованный вывод.
reader = dsp.MatFileReader('SamplesPerFrame',714,'Filename','LSM9DSHampelgyroData73.mat', ... 'VariableName','data'); hampFilt = dsp.HampelFilter(11); scope = timescope('NumInputPorts',1,'SampleRate',119,'YLimits',[-300 300], ... 'ChannelNames',{'Input','Filtered Output'},... 'TimeSpanSource','Property','TimeSpan',60,'ShowLegend',true);
Отфильтруйте данные о гироскопе с помощью dsp.HampelFilter Системный объект. Просмотрите отфильтрованные данные оси z в Time Scope.
for i = 1:10 gyroData = reader(); filteredData = hampFilt(gyroData); scope([gyroData(:,3),filteredData(:,3)]); end

Фильтр Hampel удаляет все выбросы и сохраняет форму сигнала.
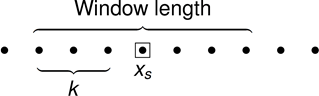
Для данной выборки данных, xs, алгоритма:
Сосредотачивает окно нечетной длины на текущей выборке.
Вычисляет локальную медиану, mi, и стандартное отклонение, σi, по активному окну данных.
Сравнивает текущую выборку с nσ × σi, где nσ является пороговым значением. Если , фильтр идентифицирует текущую выборку, xs, как выброс и заменяет его на среднее значение, mi.
Рассмотрите систему координат данных, которые передаются в фильтр Hampel.
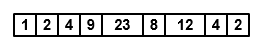
В этом примере фильтр Hampel двигает окно длины 5 (Len) по данным. Фильтр имеет пороговое значение 2 (nσ). Чтобы иметь полное окно в начале системы координат, алгоритм фильтра предварительно ожидает систему координат с Len – 1 нуль. Чтобы вычислить первую выборку выхода, окно сосредотачивается на выборка в добавленной системе координат, третий нуль в этом случае. Фильтр вычисляет медиану, среднее абсолютное отклонение и стандартное отклонение по данным в локальном окне.
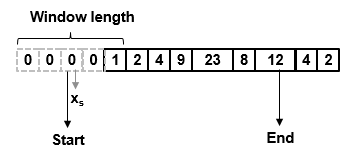
Текущая выборка: xs = 0.
Окно данных: win = [0 0 0 0 1].
Локальная медиана: mi = медиана ([0 0 0 0 1]) = 0.
Среднее абсолютное отклонение: . Для этого окна данных, .
Стандартное отклонение: σi = κ × madi = 0, где .
Текущая выборка, xs = 0, не выполняет отношение для определения выбросов.
Поэтому Hampel фильтруют выходные параметры текущая входная выборка, xs = 0.
Повторите эту процедуру для каждой последующей выборки, пока алгоритм не сосредоточит окно на выборка, отмеченная как End. Поскольку окно, сосредоточенное на последнем выборки не могут быть полными, эти выборки обрабатываются со следующей системой координат входных данных.
Вот первая выходная система координат, которую генерирует фильтр Hampel:
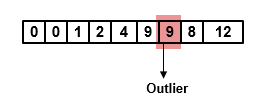
Седьмая выборка добавленного входного кадра, 23, является выбросом. Фильтр Hampel заменяет эту выборку на медиану по локальному окну [4 9 23 8 12].
[1] Боденхэм, декан. “Адаптивное обнаружение фильтрации и изменения для потоковой передачи данных”. PH.D. Тезис. Имперский колледж, Лондон, 2012.
[2] Лю, Hancong, Сириш Шах и Вэй Цзян. “Онлайновое определение выбросов и очистка данных”. Компьютеры и Химическое машиностроение. Издание 28, март 2004, стр 1635–1647.
[3] Suomela, Юкка. Медианная фильтрация эквивалентна сортировке, 2014.
