В основанной на системе координат обработке блоки обрабатывают данные одна система координат за один раз. Каждая система координат данных содержит последовательные выборки от независимого канала. Каждый канал представлен столбцом входного сигнала. Например, с основанной на системе координат точки зрения обработки, следующая 3-на-2 матрица имеет два канала, каждый из которых содержит три выборки.
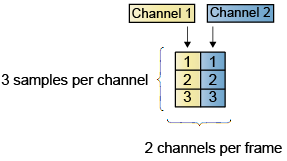
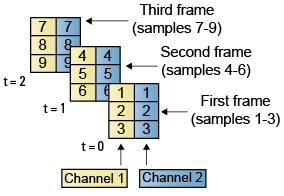
Когда вы конфигурируете блок, чтобы выполнить основанную на системе координат обработку, блок интерпретирует M-by-1 вектор как одноканальный сигнал, содержащий выборки M на систему координат. Точно так же блок интерпретирует M-by-N матрица как многоканальный сигнал с N независимые каналы и выборки M на канал. Например, в основанной на системе координат обработке, блоки интерпретируют следующую последовательность 3 2 матриц как двухканальный сигнал с форматом кадра 3.
Используя основанную на системе координат обработку выгодно для многих приложений обработки сигналов, потому что можно обработать несколько выборок целиком. Путем буферизации данных в системы координат и обработки мультидемонстрационных кадров данных, можно часто улучшать вычислительное время алгоритмов обработки сигналов. Чтобы выполнить основанную на системе координат обработку, у вас должна быть лицензия DSP System Toolbox™.
Для получения дополнительной информации о недавних изменениях в основанной на системе координат обработке, смотрите, что Основанное на системе координат обрабатывает раздел изменений DSP System Toolbox Информация о релизах.
Блок Signal From Workspace создает многоканальный сигнал для основанной на системе координат обработки, когда параметр Signal является матрицей, и параметр Samples per frame, M, больше 1. Начинаясь с первых строк M матрицы, освобождения блока строки M матрицы (то есть, одна система координат от каждого канала) к выходному порту каждый M *Ts секунды. Поэтому, если параметр Signal задает W-by-N матрица рабочей области, блок Signal From Workspace выводит серию M-by-N матрицы, представляющие каналы N. Матрица рабочей области должна быть ориентирована так, чтобы ее столбцы представляли каналы сигнала.
Рисунок ниже является графическим рисунком этого процесса для 6 4 матрицы рабочей области, A, и формат кадра 2.
Примечание
Несмотря на то, что независимые каналы обычно представляются как столбцы, одноканальный сигнал может быть представлен в рабочей области или как вектор-столбец или как вектор-строка. Выход от блока Signal From Workspace является вектор-столбцом в обоих случаях.
В следующем примере вы используете блок Signal From Workspace, чтобы создать сигнал системы координат с тремя каналами и импортировать его в модель:
Откройте модель Signal From Workspace Example 5 путем ввода
в MATLAB® командная строка.
dsp_examples_A = [1:100;-1:-1:-100]'; % 100-by-2 matrix dsp_examples_B = 5*ones(100,1); % 100-by-1 column vector
Переменная, названная dsp_examples_A представляет двухканальный сигнал 100 выборками и переменную, названную dsp_examples_B представляет сигнал с одним каналом 100 выборками.
Кроме того, следующие переменные заданы в рабочем пространстве MATLAB:
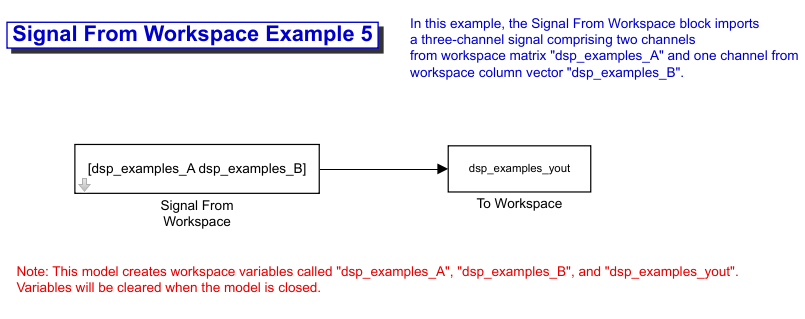
Дважды кликните блок Signal From Workspace. Установите параметры блоков можно следующим образом, и затем нажмите OK:
Параметр Signal к [dsp_examples_A dsp_examples_B]
Параметр Sample time к 1
Параметр Samples per frame к 4
Параметр Form output after final data value к Setting to zero
На основе этих параметров блок Signal From Workspace выводит сигнал с форматом кадра 4 и периодом расчета 1 секунды. Период системы координат сигнала составляет 4 секунды. Параметр Signal использует стандартный синтаксис MATLAB для горизонтально конкатенации матриц, чтобы добавить вектор-столбец dsp_examples_B справа от матричного dsp_examples_A. После того, как блок вывел сигнал, все последующие выходные параметры имеют значение нуля.
Запустите модель.
Рисунок ниже является графическим представлением того, как ваш сигнал системы координат с тремя каналами импортируется в вашу модель.
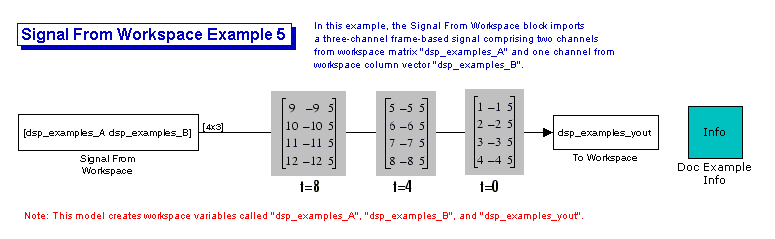
Вы теперь успешно импортировали сигнал системы координат с тремя каналами в свою модель с помощью блока Signal From Workspace.
To Workspace (Simulink) и блоки Triggered To Workspace является первичными блоками для экспорта сигналов всех размерностей от Simulink® модель к рабочему пространству MATLAB.
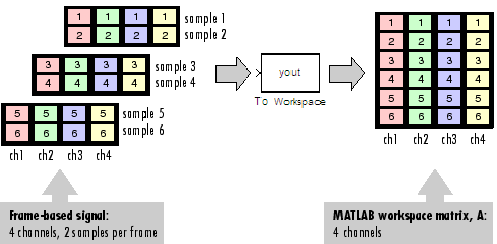
Сигнал с каналами N и форматом кадра M представлен последовательностью M-by-N матрицы. Когда этот сигнал вводится с блоком To Workspace, блок создает P-by-N массив в рабочем пространстве MATLAB, содержащем P новые выборки от каждого канала. Количество строк, P, задано параметром Limit data points to last. Новейшие выборки добавляются в нижней части матрицы.
Следующая фигура является графическим рисунком этого процесса для трех последовательных систем координат сигнала с форматом кадра 2, который экспортируется, чтобы матрицировать A в рабочем пространстве MATLAB.
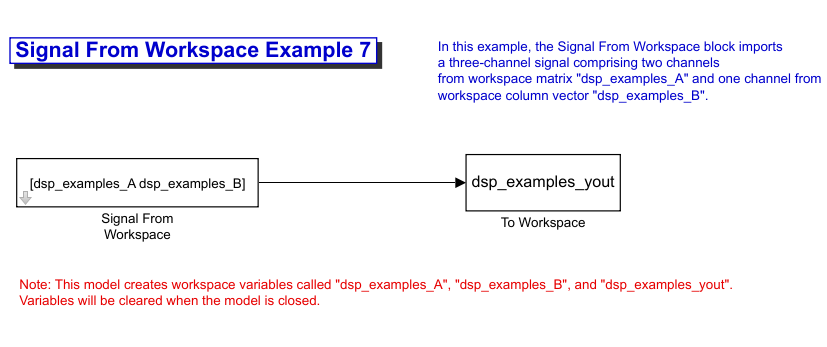
В следующем примере вы используете блок To Workspace, чтобы экспортировать сигнал с тремя каналами с четырьмя выборками на систему координат к рабочему пространству MATLAB.
Откройте модель Signal From Workspace Example 7 путем ввода ex_exportfbsigs в командной строке MATLAB.
Кроме того, следующие переменные заданы в рабочем пространстве MATLAB:
Переменная, названная dsp_examples_A представляет двухканальный сигнал 100 выборками и переменную, названную dsp_examples_B представляет сигнал с одним каналом 100 выборками.
dsp_examples_A = [1:100;-1:-1:-100]'; % 100-by-2 matrix dsp_examples_B = 5*ones(100,1); % 100-by-1 column vector
Дважды кликните блок Signal From Workspace. Установите параметры блоков можно следующим образом, и затем нажмите OK:
Signal = [dsp_examples_A dsp_examples_B]
Sample time = 1
Samples per frame = 4
Form output after final data value =
Setting to zero
На основе этих параметров блок Signal From Workspace выводит сигнал с форматом кадра 4 и периодом расчета 1 секунды. Период системы координат сигнала составляет 4 секунды. Параметр Signal использует стандартный синтаксис MATLAB для горизонтально конкатенации матриц, чтобы добавить вектор-столбец dsp_examples_B справа от матричного dsp_examples_A. После того, как блок вывел сигнал, все последующие выходные параметры имеют значение нуля.
Дважды кликните блок To Workspace. Установите параметры блоков можно следующим образом, и затем нажмите OK:
Variable name = dsp_examples_yout
Limit data points to last = inf
Decimation = 1
Frames = Concatenate frames (2-D array)
На основе этих параметров блок To Workspace экспортирует свой входной сигнал в переменную под названием dsp_examples_yout в рабочем пространстве MATLAB. Переменная рабочей области может стать неопределенно большой для того, чтобы получить все входные данные. Сигнал не подкошен, прежде чем он будет экспортирован в рабочее пространство MATLAB, и каждый входной кадр вертикально конкатенирован к предыдущей системе координат, чтобы произвести 2D массив выход.
Запустите модель.
Следующая фигура является графическим представлением поведения модели в процессе моделирования.
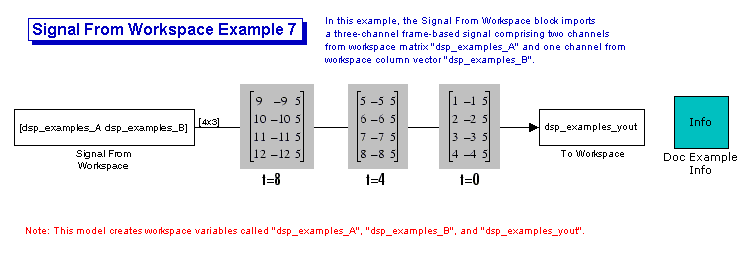
В командной строке MATLAB введите dsp_examples_yout.
Выход показывают ниже:
dsp_examples_yout =
1 -1 5
2 -2 5
3 -3 5
4 -4 5
5 -5 5
6 -6 5
7 -7 5
8 -8 5
9 -9 5
10 -10 5
11 -11 5
12 -12 5
Системы координат сигнала конкатенированы, чтобы сформировать двумерный массив.
Вы теперь успешно вывели сигнал системы координат к рабочему пространству MATLAB с помощью блока To Workspace.
