Основанные на выборке сигналы являются наиболее основным типом сигнала и являются самыми легкими создать из реального (физического) сигнала. Можно создать основанный на выборке сигнал путем выборки физического сигнала на уровне данной частоты дискретизации и вывода каждой отдельной выборки, когда она получена. В общем случае большинство Цифро-аналоговых преобразователей выводит основанные на выборке сигналы.
Можно создать основанные на системе координат сигналы из основанных на выборке сигналов. Когда вы буферизуете пакет выборок N, вы создаете систему координат данных. Можно затем вывести последовательные системы координат данных на уровне, который является 1/N временами частота дискретизации исходного основанного на выборке сигнала. Уровень, на котором вы выводите системы координат данных, также известен как frame rate сигнала.
Основанные на системе координат данные являются распространенным форматом в режиме реального времени системы. Оборудование сбора данных часто действует путем накопления большого количества выборок сигнала на высоком показателе. Оборудование затем распространяет те выборки к системе реального времени как блок данных. Выполнение так максимизирует КПД системы путем распределения фиксированного процесса наверху на многих выборках. Более быстрый сбор данных приостановлен более медленными процессами прерывания после того, как каждая система координат будет получена, а не после каждой отдельной выборки. Смотрите Преимущества Основанной на системе координат Обработки для получения дополнительной информации.
| Исходные блоки DSP System Toolbox™ | Создайте основанные на выборке сигналы | Создайте основанные на системе координат сигналы |
|---|---|---|
| Chirp | X | X |
| Constant (Simulink) | X | X |
| Colored Noise | X | X |
| Discrete Impulse | X | X |
| From Multimedia File | X | X |
| Identity Matrix | X | |
| Multiphase Clock | X | X |
| N-Sample Enable | X | X |
| Random Source | X | |
| Signal From Workspace | X | X |
| Sine Wave | X | X |
| UDP Receive | X |
Когда вы обрабатываете сигналы с помощью программного обеспечения DSP System Toolbox, можно сделать так или в выборке - или в основанном на системе координат способе. Когда вы работаете с блоками в Simulink®, можно задать на базисе блока блоком, который выполняет тип обработки блока. В большинстве случаев вы задаете режим обработки путем установки параметра Input processing. Когда вы используете Системные объекты в MATLAB®, только основанная на системе координат обработка доступна. Следующая таблица показывает общие установки параметров, которые можно использовать, чтобы выполнить выборку - и основанная на системе координат обработка в MATLAB и Simulink.
| Основанная на выборке обработка | Основанная на системе координат обработка | |
|---|---|---|
| Simulink — Блоки | Input processing = Elements as channels (sample based) | Input processing = Columns as channels (frame based) |
В основанной на выборке обработке процесс блоков сигнализирует об одной выборке за один раз. Каждый элемент входного сигнала представляет одну выборку в отличном канале. Например, с основанной на выборке точки зрения обработки, следующая 3-на-2 матрица содержит первую выборку в каждом из шести независимых каналов.
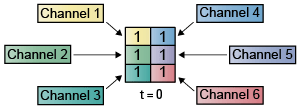
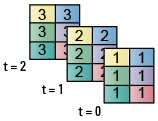
Когда вы конфигурируете блок, чтобы выполнить основанную на выборке обработку, блок интерпретирует скалярный вход как одноканальный сигнал. Точно так же блок интерпретирует M-by-N матрица как многоканальный сигнал с M *N независимые каналы. Например, в основанной на выборке обработке, блоки интерпретируют следующую последовательность 3 2 матриц как сигнал с шестью каналами.
Для получения дополнительной информации о недавних изменениях в основанной на системе координат обработке, смотрите, что Основанное на системе координат обрабатывает раздел изменений DSP System Toolbox Информация о релизах.
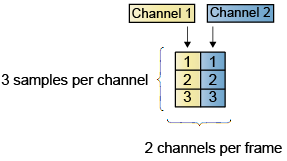
В основанной на системе координат обработке блоки обрабатывают данные одна система координат за один раз. Каждая система координат данных содержит последовательные выборки от независимого канала. Каждый канал представлен столбцом входного сигнала. Например, с основанной на системе координат точки зрения обработки, следующая 3-на-2 матрица имеет два канала, каждый из которых содержит три выборки.
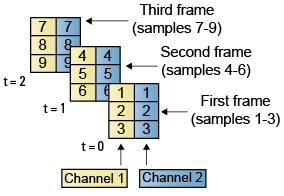
Когда вы конфигурируете блок, чтобы выполнить основанную на системе координат обработку, блок интерпретирует M-by-1 вектор как одноканальный сигнал, содержащий выборки M на систему координат. Точно так же блок интерпретирует M-by-N матрица как многоканальный сигнал с N независимые каналы и выборки M на канал. Например, в основанной на системе координат обработке, блоки интерпретируют следующую последовательность 3 2 матриц как двухканальный сигнал с форматом кадра 3.
Используя основанную на системе координат обработку выгодно для многих приложений обработки сигналов, потому что можно обработать несколько выборок целиком. Путем буферизации данных в системы координат и обработки мультидемонстрационных кадров данных, можно часто улучшать вычислительное время алгоритмов обработки сигналов. Чтобы выполнить основанную на системе координат обработку, у вас должна быть лицензия DSP System Toolbox.
Для получения дополнительной информации о недавних изменениях в основанной на системе координат обработке, смотрите, что Основанное на системе координат обрабатывает раздел изменений DSP System Toolbox Информация о релизах.
Основанная на системе координат обработка является установленным методом ускорения и системы реального времени и симуляции модели.
Ускорьте Системы реального времени. Основанные на системе координат данные являются распространенным форматом в режиме реального времени системы. Оборудование сбора данных часто действует путем накопления большого количества выборок сигнала на высоком показателе, и затем распространения тех выборок к системе реального времени как блок данных. Этот тип распространения максимизирует КПД системы путем распределения фиксированного процесса наверху на многих выборках; более быстрый сбор данных приостановлен более медленными процессами прерывания после того, как каждая система координат получена, а не после того, как каждая отдельная выборка получена.
Следующая фигура иллюстрирует, как основанная на системе координат обработка увеличивает пропускную способность. Тонкие блоки каждый представляет время, протекли во время захвата выборки. Более толстые блоки каждый представляет время, протекли во время процедуры обработки прерывания (ISR), которая считывает данные из оборудования.
В этом примере основанная на системе координат операция получает систему координат 16 выборок между каждым ISR. Таким образом основанный на системе координат уровень пропускной способности много раз выше, чем основанная на выборке альтернатива.
Следует иметь в виду, что основанная на системе координат обработка вводит определенное количество задержки в процесс из-за свойственной задержки в буферизации начальной системы координат. Во многих экземплярах, однако, можно выбрать форматы кадра, которые улучшают пропускную способность, не создавая недопустимые задержки. Для получения дополнительной информации смотрите Задержку и Задержку.
Ускорьте Симуляции модели. Симуляция вашей модели также извлекает выгоду из основанной на системе координат обработки. В этом случае вы уменьшаете издержки коммуникаций от блока к блоку путем распространения систем координат данных, а не отдельных выборок.
