Ориентация от акселерометра и показаний гироскопа
imufilter Система object™ плавит акселерометр и данные о датчике гироскопа, чтобы оценить ориентацию устройства.
Оценить ориентацию устройства:
Создайте imufilter объект и набор его свойства.
Вызовите объект с аргументами, как будто это была функция.
Чтобы узнать больше, как Системные объекты работают, смотрите то, Что Системные объекты?
FUSE = imufilterFUSE, для сплава акселерометра и данных о гироскопе, чтобы оценить ориентацию устройства. Фильтр использует вектор состояния с девятью элементами для дефекта записи в оценке ориентации, оценке смещения гироскопа и линейной ускоряющей оценке.
FUSE = imufilter('ReferenceFrame',RF)imufilter отфильтруйте Системный объект, который плавит акселерометр и данные о гироскопе, чтобы оценить ориентацию устройства относительно системы координат RF. Задайте RF как 'NED' (Северо-восток вниз) или 'ENU' (Восточный Север). Значением по умолчанию является 'NED'.
FUSE = imufilter(___,Name,Value)Name к заданному Value. Незаданные свойства имеют значения по умолчанию.
FUSE = imufilter('SampleRate',200,'GyroscopeNoise',1e-6) создает Системный объект, FUSE, с частотой дискретизации на 200 Гц и набором шума гироскопа к 1e-6 радианам в секунду придал квадратную форму.[ акселерометр предохранителей и показания гироскопа, чтобы вычислить ориентацию и измерения скорости вращения. Алгоритм принимает, что устройство является стационарным перед первым вызовом.orientation,angularVelocity] = FUSE(accelReadings,gyroReadings)
Чтобы использовать объектную функцию, задайте Системный объект как первый входной параметр. Например, чтобы выпустить системные ресурсы Системного объекта под названием obj, используйте этот синтаксис:
release(obj)
Загрузите rpy_9axis файл, который содержит записанный акселерометр, гироскоп и данные о датчике магнитометра из устройства, колеблющегося в тангаже (вокруг оси Y), затем отклоняется от курса (вокруг оси z), и затем прокручивается (вокруг оси X). Файл также содержит частоту дискретизации записи.
load 'rpy_9axis.mat' sensorData Fs accelerometerReadings = sensorData.Acceleration; gyroscopeReadings = sensorData.AngularVelocity;
Создайте imufilter Система object™ с набором частоты дискретизации к частоте дискретизации данных о датчике. Задайте фактор децимации два, чтобы уменьшать вычислительную стоимость алгоритма.
decim = 2; fuse = imufilter('SampleRate',Fs,'DecimationFactor',decim);
Передайте показания акселерометра и показания гироскопа к imufilter объект, fuse, выводить оценку ориентации корпуса датчика в зависимости от времени. По умолчанию ориентация выводится как вектор из кватернионов.
q = fuse(accelerometerReadings,gyroscopeReadings);
Ориентация задана угловым смещением, требуемым вращать систему координаты вышестоящего элемента к системе координаты нижестоящего элемента. Постройте ориентацию в Углах Эйлера в градусах в зависимости от времени.
imufilter сплав правильно оценивает изменение в ориентации от принятой стоящей с севером начальной ориентации. Однако ось X устройства указывала на юг, когда зарегистрировано. Чтобы правильно оценить ориентацию относительно истинной начальной ориентации или относительно NED, используйте ahrsfilter.
time = (0:decim:size(accelerometerReadings,1)-1)/Fs; plot(time,eulerd(q,'ZYX','frame')) title('Orientation Estimate') legend('Z-axis', 'Y-axis', 'X-axis') xlabel('Time (s)') ylabel('Rotation (degrees)')

Смоделируйте наклон IMU, который содержит акселерометр и гироскоп с помощью imuSensor Система object™. Используйте идеальные и реалистические модели, чтобы сравнить результаты отслеживания ориентации с помощью imufilter Системный объект.
Загрузите struct, описывающий движение основной истины и частоту дискретизации. Struct движения описывает последовательные вращения:
рыскание: 120 градусов более чем две секунды
тангаж: 60 градусов более чем одна секунда
крен: 30 градусов по половине второго
крен:-30 градусов по половине второго
тангаж:-60 градусов более чем одна секунда
рыскание:-120 градусов более чем две секунды
На последней стадии struct движения комбинирует 1-е, 2-е, и 3-и вращения во вращение одно оси. Ускорение, скорость вращения и ориентация заданы в локальной системе координат NED.
load y120p60r30.mat motion fs accNED = motion.Acceleration; angVelNED = motion.AngularVelocity; orientationNED = motion.Orientation; numSamples = size(motion.Orientation,1); t = (0:(numSamples-1)).'/fs;
Создайте идеальный объект датчика IMU и объект фильтра IMU по умолчанию.
IMU = imuSensor('accel-gyro','SampleRate',fs); aFilter = imufilter('SampleRate',fs);
В цикле:
Симулируйте IMU выход путем питания движения основной истины объект датчика IMU.
Отфильтруйте IMU выход с помощью объекта фильтра IMU по умолчанию.
orientation = zeros(numSamples,1,'quaternion'); for i = 1:numSamples [accelBody,gyroBody] = IMU(accNED(i,:),angVelNED(i,:),orientationNED(i,:)); orientation(i) = aFilter(accelBody,gyroBody); end release(aFilter)
Стройте ориентацию в зависимости от времени.
figure(1) plot(t,eulerd(orientation,'ZYX','frame')) xlabel('Time (s)') ylabel('Rotation (degrees)') title('Orientation Estimation -- Ideal IMU Data, Default IMU Filter') legend('Z-axis','Y-axis','X-axis')

Измените свойства своего imuSensor смоделировать реальные датчики. Запустите цикл снова и стройте оценку ориентации в зависимости от времени.
IMU.Accelerometer = accelparams( ... 'MeasurementRange',19.62, ... 'Resolution',0.00059875, ... 'ConstantBias',0.4905, ... 'AxesMisalignment',2, ... 'NoiseDensity',0.003924, ... 'BiasInstability',0, ... 'TemperatureBias', [0.34335 0.34335 0.5886], ... 'TemperatureScaleFactor',0.02); IMU.Gyroscope = gyroparams( ... 'MeasurementRange',4.3633, ... 'Resolution',0.00013323, ... 'AxesMisalignment',2, ... 'NoiseDensity',8.7266e-05, ... 'TemperatureBias',0.34907, ... 'TemperatureScaleFactor',0.02, ... 'AccelerationBias',0.00017809, ... 'ConstantBias',[0.3491,0.5,0]); orientationDefault = zeros(numSamples,1,'quaternion'); for i = 1:numSamples [accelBody,gyroBody] = IMU(accNED(i,:),angVelNED(i,:),orientationNED(i,:)); orientationDefault(i) = aFilter(accelBody,gyroBody); end release(aFilter) figure(2) plot(t,eulerd(orientationDefault,'ZYX','frame')) xlabel('Time (s)') ylabel('Rotation (degrees)') title('Orientation Estimation -- Realistic IMU Data, Default IMU Filter') legend('Z-axis','Y-axis','X-axis')

Способность imufilter отслеживать достоверные данные значительно уменьшается при моделировании реалистического IMU. Чтобы улучшать производительность, измените свойства своего imufilter объект. Эти значения были определены опытным путем. Запустите цикл снова и стройте оценку ориентации в зависимости от времени.
aFilter.GyroscopeNoise = 7.6154e-7; aFilter.AccelerometerNoise = 0.0015398; aFilter.GyroscopeDriftNoise = 3.0462e-12; aFilter.LinearAccelerationNoise = 0.00096236; aFilter.InitialProcessNoise = aFilter.InitialProcessNoise*10; orientationNondefault = zeros(numSamples,1,'quaternion'); for i = 1:numSamples [accelBody,gyroBody] = IMU(accNED(i,:),angVelNED(i,:),orientationNED(i,:)); orientationNondefault(i) = aFilter(accelBody,gyroBody); end release(aFilter) figure(3) plot(t,eulerd(orientationNondefault,'ZYX','frame')) xlabel('Time (s)') ylabel('Rotation (degrees)') title('Orientation Estimation -- Realistic IMU Data, Nondefault IMU Filter') legend('Z-axis','Y-axis','X-axis')

Определить количество улучшенной производительности модифицированного imufilter, постройте расстояние кватерниона между движением основной истины и ориентацией, как возвращено imufilter со свойствами не по умолчанию и по умолчанию.
qDistDefault = rad2deg(dist(orientationNED,orientationDefault)); qDistNondefault = rad2deg(dist(orientationNED,orientationNondefault)); figure(4) plot(t,[qDistDefault,qDistNondefault]) title('Quaternion Distance from True Orientation') legend('Realistic IMU Data, Default IMU Filter', ... 'Realistic IMU Data, Nondefault IMU Filter') xlabel('Time (s)') ylabel('Quaternion Distance (degrees)')

В этом примере показано, как удалить смещение гироскопа из IMU использование imufilter.
Используйте kinematicTrajectory создать траекторию с двумя частями. Первая часть имеет постоянную угловую скорость приблизительно y-и оси z. Вторая часть имеет различную скорость вращения во всех трех осях.
duration = 60*8; fs = 20; numSamples = duration * fs; rng('default') % Seed the RNG to reproduce noisy sensor measurements. initialAngVel = [0,0.5,0.25]; finalAngVel = [-0.2,0.6,0.5]; constantAngVel = repmat(initialAngVel,floor(numSamples/2),1); varyingAngVel = [linspace(initialAngVel(1), finalAngVel(1), ceil(numSamples/2)).', ... linspace(initialAngVel(2), finalAngVel(2), ceil(numSamples/2)).', ... linspace(initialAngVel(3), finalAngVel(3), ceil(numSamples/2)).']; angVelBody = [constantAngVel; varyingAngVel]; accBody = zeros(numSamples,3); traj = kinematicTrajectory('SampleRate',fs); [~,qNED,~,accNED,angVelNED] = traj(accBody,angVelBody);
Создайте imuSensor Система object™, IMU, с неидеальным гироскопом. Вызовите IMU с ускорением основной истины, скоростью вращения и ориентацией.
IMU = imuSensor('accel-gyro', ... 'Gyroscope',gyroparams('RandomWalk',0.003,'ConstantBias',0.3), ... 'SampleRate',fs); [accelReadings, gyroReadingsBody] = IMU(accNED,angVelNED,qNED);
Создайте imufilter Системный объект, fuse. Вызовите fuse со смоделированными показаниями акселерометра и показаниями гироскопа.
fuse = imufilter('SampleRate',fs, 'GyroscopeDriftNoise', 1e-6); [~,angVelBodyRecovered] = fuse(accelReadings,gyroReadingsBody);
Постройте скорость вращения основной истины, показания гироскопа и восстановленную скорость вращения для каждой оси.
Скорость вращения возвращена в imufilter компенсирует эффект смещения гироскопа в зависимости от времени и сходится к истинной скорости вращения.
time = (0:numSamples-1)'/fs; figure(1) plot(time,angVelBody(:,1), ... time,gyroReadingsBody(:,1), ... time,angVelBodyRecovered(:,1)) title('X-axis') legend('True Angular Velocity', ... 'Gyroscope Readings', ... 'Recovered Angular Velocity') ylabel('Angular Velocity (rad/s)')

figure(2) plot(time,angVelBody(:,2), ... time,gyroReadingsBody(:,2), ... time,angVelBodyRecovered(:,2)) title('Y-axis') ylabel('Angular Velocity (rad/s)')

figure(3) plot(time,angVelBody(:,3), ... time,gyroReadingsBody(:,3), ... time,angVelBodyRecovered(:,3)) title('Z-axis') ylabel('Angular Velocity (rad/s)') xlabel('Time (s)')

Примечание: следующий алгоритм только применяется к системе координат NED.
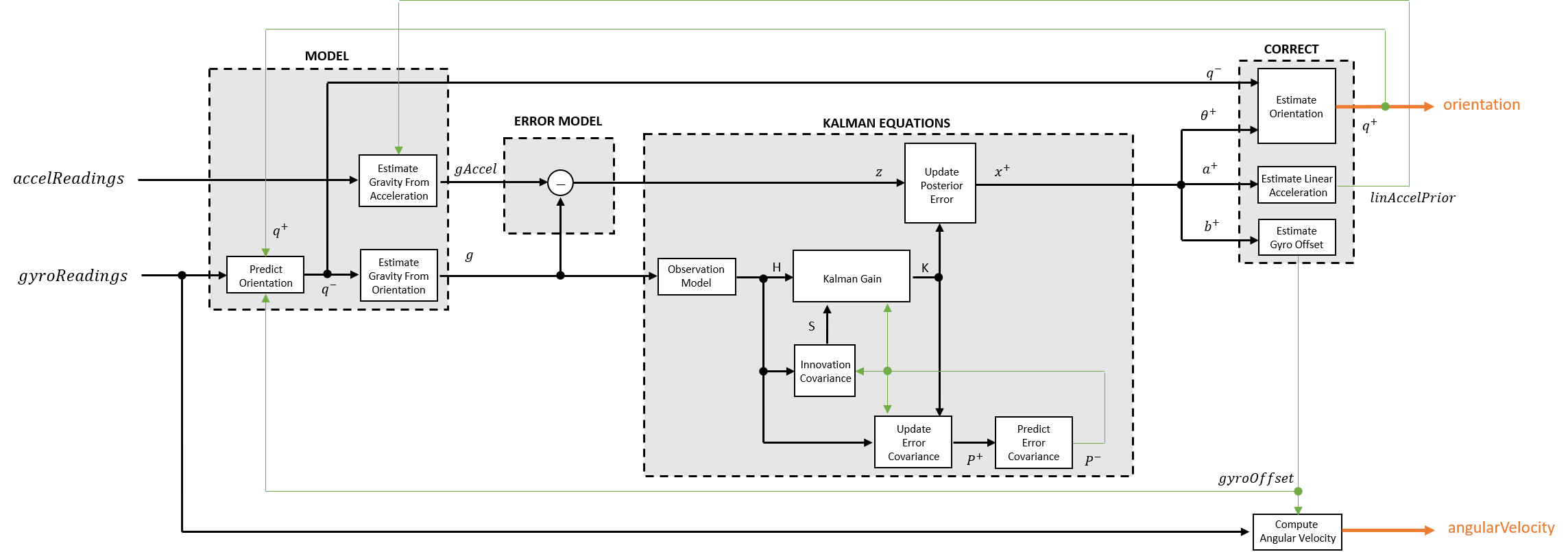
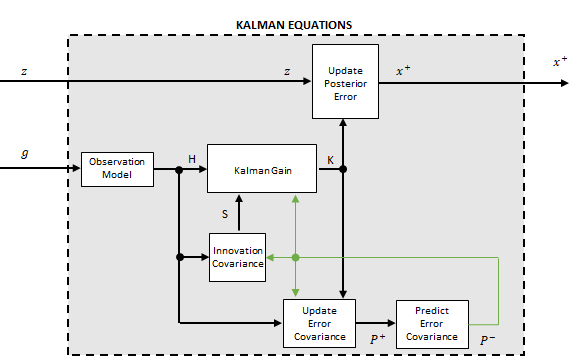
imufilter использует структуру Фильтра Калмана с шестью осями, описанную в [1]. Алгоритм пытается отследить ошибки в ориентации, смещении гироскопа и линейном ускорении, чтобы вывести итоговую ориентацию и скорость вращения. Вместо того, чтобы отследить ориентацию непосредственно, косвенный Фильтр Калмана моделирует ошибочный процесс, x, с рекурсивным обновлением:
где xk 9 1 вектор, состоящий из:
θk – Вектор ошибок ориентации 3 на 1, в градусах, во время k
bk – Нуль гироскопа 3 на 1 угловой вектор смещения уровня, в градусе/с, во время k
ak – Ускоряющий вектор ошибок 3 на 1 измеряется в системе координат датчика, в g, во время k
wk – 9 1 аддитивный шумовой вектор
Fk – модель изменения состояния
Поскольку x k задан как ошибочный процесс, априорная оценка всегда является нулем, и поэтому модель изменения состояния, F k, является нулем. Это понимание приводит к следующему сокращению стандарта уравнения Кальмана:
Стандарт уравнения Кальмана:
Уравнения Кальмана использовали в этом алгоритме:
где
xk− – предсказанный (априорно) утверждают оценку; ошибочный процесс
Pk− – предсказанный (априорно) оценивают ковариацию
yk – инновации
Sk – инновационная ковариация
Kk – Усиление Кальмана
xk+ – обновленный (по опыту) утверждают оценку
Pk+ – обновленный (по опыту) оценивают ковариацию
k представляет итерацию, верхний индекс + представляет по опыту оценка и верхний индекс − представляет априорную оценку.
Графические и следующие шаги описывают одну основанную на системе координат итерацию через алгоритм.
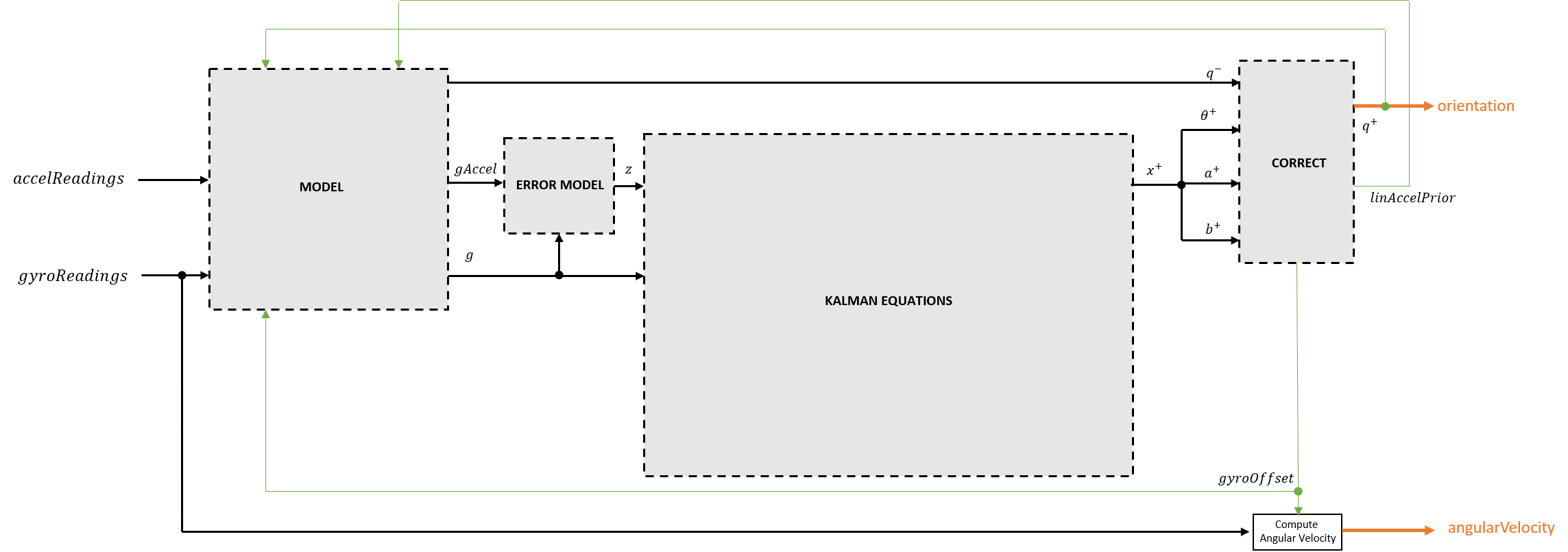
Перед первой итерацией, accelReadings и gyroReadings входные параметры разделяются на блоки в 1 3 системы координат и DecimationFactor- 3 системы координат, соответственно. Алгоритм использует актуальнейшие показания акселерометра, соответствующие фрагменту показаний гироскопа.
Продвиньтесь через алгоритм для объяснения каждого этапа подробного обзора.
Ускорение моделей алгоритма и угловое изменение как линейные процессы.
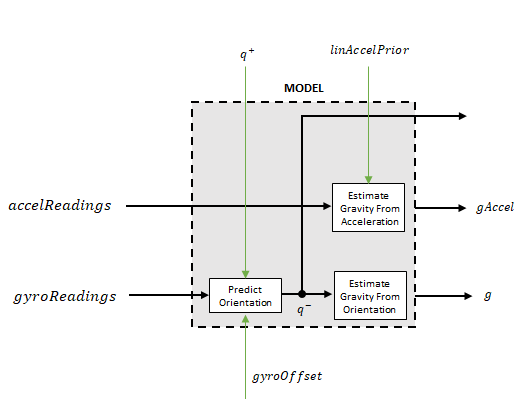
Ориентация для текущей системы координат предсказана первой оценкой углового изменения от предыдущей системы координат:
где N является фактором децимации, заданным DecimationFactor свойство и fs являются частотой дискретизации, заданной SampleRate свойство.
Угловое изменение преобразовано в кватернионы с помощью rotvec
quaternion синтаксис конструкции:
Предыдущая оценка ориентации обновляется путем вращения его ΔQ:
Во время первой итерации, оценки ориентации, q−, инициализируется ecompass с предположением, что x - ось указывает север.
Вектор силы тяжести интерпретирован как третий столбец кватерниона, q−, в матричной форме вращения:
Смотрите ecompass для объяснения того, почему третий столбец rPrior может быть интерпретирован как вектор силы тяжести.
Вторая оценка вектора силы тяжести сделана путем вычитания затухшей линейной ускоряющей оценки предыдущей итерации от показаний акселерометра:
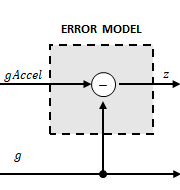
Ошибочная модель является различием между оценкой силы тяжести от показаний акселерометра и оценкой силы тяжести от показаний гироскопа: .
Уравнения Кальмана используют оценку силы тяжести, выведенную из показаний гироскопа, g и наблюдения за ошибочным процессом, z, чтобы обновить коэффициент усиления Кальмана и посреднические ковариационные матрицы. Усиление Кальмана применяется к сигналу ошибки, z, чтобы вывести по опыту ошибочная оценка, x+.
Модель наблюдения сопоставляет 1 3 наблюдаемое состояние, g, в 3 9 истинное состояние, H.
Модель наблюдения создается как:
где gx, gy и gz является x - y - и z - элементы вектора силы тяжести, оцененного от ориентации, соответственно. κ является константой, определенной свойствами SampleRate и DecimationFactor: κ = DecimationFactor/SampleRate.
Смотрите разделы 7.3 и 7.4 из [1] для деривации модели наблюдения.
Инновационная ковариация является 3х3 матрицей, используемой, чтобы отследить изменчивость в измерениях. Инновационная ковариационная матрица вычисляется как:
где
H является матрицей модели наблюдения
P− предсказанная (априорная) оценка ковариации модели наблюдения, вычисленной в предыдущей итерации
R является ковариацией шума модели наблюдения, вычисленного как:
Следующие свойства задают модель наблюдения шумовое отклонение:
Ошибочная оценочная ковариация 9 9, матрица раньше отслеживала изменчивость в состоянии.
Ошибочная оценочная ковариационная матрица обновляется как:
где K является усилением Кальмана, H является матрицей измерения и P− ошибочная оценочная ковариация, вычисленная во время предыдущей итерации.
Ошибочная оценочная ковариация 9 9, матрица раньше отслеживала изменчивость в состоянии. Априорная ошибка оценивает ковариацию, P−, установлен в ковариацию шума процесса, Q, определенный во время предыдущей итерации. Q вычисляется в зависимости от по опыту ошибочная оценочная ковариация, P+. При вычислении Q термины взаимной корреляции приняты, чтобы быть незначительными по сравнению с терминами автокорреляции и обнуляются:
где
P+ – обновленный (по опыту) ошибочная оценочная ковариация
η – GyroscopeNoise
Смотрите раздел 10.1 из [1] для деривации терминов ошибочной матрицы процесса.
Матрица усиления Кальмана 9 3, матрица раньше взвешивала инновации. В этом алгоритме инновации интерпретированы как ошибочный процесс, z.
Матрица усиления Кальмана создается как:
где
P- – предсказанная ошибочная ковариация
H модель наблюдения
S инновационная ковариация
Следующая ошибочная оценка определяется путем объединения матрицы усиления Кальмана с ошибкой по оценкам вектора силы тяжести:
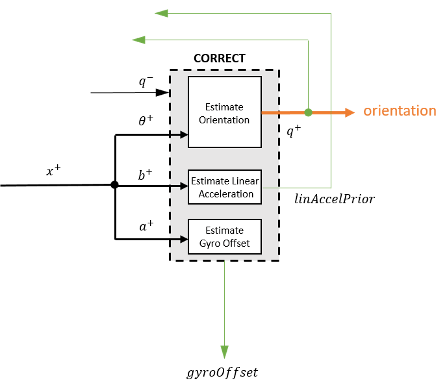
Оценка ориентации обновляется путем умножения предыдущей оценки ошибкой:
Линейная ускоряющая оценка обновляется путем затухания линейной ускоряющей оценки от предыдущей итерации и вычитания ошибки:
где
Оценка смещения гироскопа обновляется путем вычитания ошибки смещения гироскопа из смещения гироскопа от предыдущей итерации:
[1] Cочетание датчиков С открытым исходным кодом. https://github.com/memsindustrygroup/Open-Source-Sensor-Fusion/tree/master/docs
[2] Roetenberg, D., Х.Дж. Линдж, C.T.M. Baten и П.Х. Велтинк. "Компенсация Магнитных Воздействий Улучшает Инерционное и Магнитное Обнаружение Ориентации Сегмента Человеческого тела". Транзакции IEEE в Нейронных Системах и Разработке Реабилитации. Издание 13. Выпуск 3, 2005, стр 395-405.
ecompass | ahrsfilter | imuSensor | gpsSensor | quaternion
