Система слежения датчика кратного может обеспечить лучшую эффективность, чем одна система датчика, потому что это может предоставить более широкую страховую защиту и лучшую видимость. Кроме того, плавление обнаружений от различных типов датчиков может также улучшить качество и точность целевых оценок. Два типа архитектуры обычно используются в системе слежения датчика кратного. В первом типе архитектуры — отслеживания центрального уровня — обнаружения от всех датчиков отправляются непосредственно в систему слежения, которая обеспечивает дорожки на основе всех обнаружений. Теоретически, архитектура отслеживания центрального уровня может достигнуть лучшей эффективности, потому что это может полностью использовать всю информацию, содержавшуюся в обнаружениях. Однако можно также применить иерархическую структуру с отслеживанием уровня датчика, объединенным со сплавом уровня дорожки для системы датчика кратного. Рисунок показывает типичную систему слежения центрального уровня и типичную систему сплава от дорожки к дорожке на основе отслеживания уровня датчика и сплава уровня дорожки.
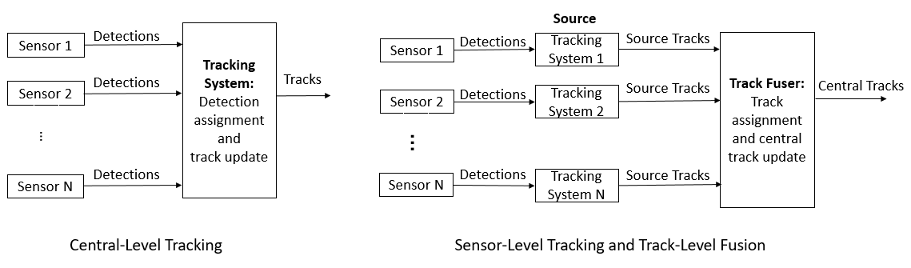
Чтобы представлять каждый элемент в системе сплава от дорожки к дорожке, вызовите системы слежения, которые выводят дорожки к термофиксатору как источники и вызывают выведенные дорожки из источников как исходные дорожки или локальные дорожки. Вызовите дорожки, обеспеченные в термофиксаторе как центральные дорожки.
В некоторых случаях архитектура сплава от дорожки к дорожке может быть предпочтительна для архитектуры отслеживания центрального уровня. Эти случаи включают:
Во многих приложениях система слежения не только должна отследить цели в своей среде для самонавигации, но также и должна передать ее обеспеченные дорожки окружению систем слежения для лучшей полной эффективности навигации. Например, автономное транспортное средство, которое отслеживает его собственную ситуативную среду, может также совместно использовать обеспеченные дорожки с другими транспортными средствами, чтобы упростить их навигацию.
На практике много датчиков непосредственно выводят дорожки вместо обнаружений. Поэтому, чтобы объединить информацию от датчиков, которые выводят дорожки, сплав уровня дорожки требуется.
Когда коммуникационная полоса пропускания ограничивается, передавание списка дорожек часто более эффективно, чем передача набора обнаружений. Это может быть особенно важно для случаев, в которых список дорожек предоставлен по льготному тарифу относительно частоты развертки.
Когда количество датчиков и обнаружений является большим, сложность расчета для централизованной системы слежения может быть высокой, особенно для присвоения обнаружения. Архитектура сплава от дорожки к дорожке может распределить некоторое присвоение и рабочую нагрузку оценки к отслеживанию уровня датчика, которое уменьшает сложность расчета термофиксатора.
Несмотря на все преимущества, способствующие архитектуре сплава от дорожки к дорожке, это также излагает дополнительную сложность и вызовы системе слежения. В отличие от обнаружений, которые могут быть приняты, чтобы быть условно независимыми, оценки дорожки из каждого источника коррелируются друг с другом, потому что они совместно используют общую ошибку предсказания, следующую из общей модели процесса. Поэтому вычисление сплавленной дорожки с помощью стандартного подхода фильтрации может привести к неправильным результатам. Следующие эффекты должны быть рассмотрены:
Общий шум процесса — Поскольку датчики наблюдают и отслеживают ту же цель, они совместно используют некоторую общую динамику. В результате целевое маневрирование может привести к средней погрешности, которая характерна для всех датчиков.
Коррелируемый со временем шум измерения — Если сплав дорожки повторяется в зависимости от времени, стандартное предположение Фильтра Калмана, что измерения не коррелируются в зависимости от времени, нарушается, потому что ошибки оценки состояния дорожки уровня датчика коррелируются в зависимости от времени.
Можно использовать trackFuser в Sensor Fusion and Tracking Toolbox™ в целях сплава от дорожки к дорожке. trackFuser Система object™ предоставляет два алгоритма, чтобы объединить исходные дорожки, рассматривая эффекты коррекции между различными дорожками. Можно выбрать алгоритм путем определения StateFusion свойство trackFuser как:
'Cross' — Использует алгоритм сплава перекрестной ковариации.
'Intersection' — Использует перекрестный алгоритм сплава ковариации.
Можно также настроить собственный алгоритм сплава.
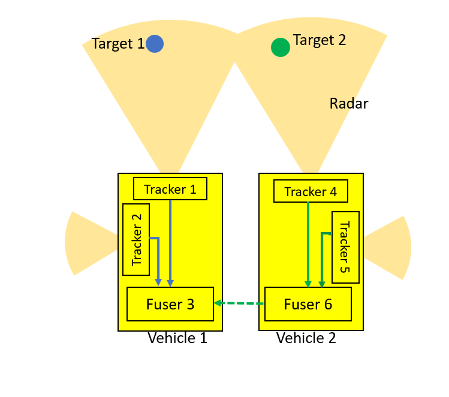
Кроме стандартной архитектуры сплава от дорожки к дорожке, показанной на предыдущем рисунке, можно также использовать другие типы архитектур с trackFuser. Например, следующая фигура иллюстрирует систему 2D отслеживания транспортных средств.
На каждом транспортном средстве два датчика отслеживают соседние цели со связанными средствами отслеживания. Каждое транспортное средство также имеет термофиксатор, который плавит исходные дорожки от двух средств отслеживания. Термофиксатор 6 может передать свои обеспеченные центральные дорожки к Термофиксатору 3. С этой архитектурой Транспортное средство 1 может возможно идентифицировать цели (Предназначайтесь 2 на рисунке), которые не являются в поле зрения его собственных датчиков.
Чтобы уменьшать распространение слуха, можно обработать исходные дорожки от Термофиксатора 6 к Термофиксатору 3 как внешние путем определения IsInternalSource свойство fuserSourceConfiguration как false при подготовке SourceConfigurations свойство TrackFuser.
Поскольку дорожки, о которых сообщают различные средства отслеживания, могут быть описаны в различных координатных системах координат, необходимо задать координатное преобразование между источником и термофиксатором путем определения fuserSourceConfiguration свойство.
trackFuser | fuserSourceConfiguration | trackerGNN | trackerJPDA | trackerTOMHT | trackerPHD
[1] Чон, C. Y. С. Мори, В. Х. Баркер и К. К. Чанг. "Архитектуры и Алгоритмы для Ассоциации Дорожки и Fusion". Космос IEEE и Журнал Электронных систем, Издание 15, № 1, 2000, стр 5 – 13.
