Луч вентилятора преобразовывает
F = fanbeam(I,D,Name,Value)
[ возвращает местоположение датчиков луча вентилятора в F,fan_sensor_positions,fan_rotation_angles]
= fanbeam(___)fan_sensor_positions и углы поворота, где проекции луча вентилятора вычисляются в fan_rotation_angles.
Установите настройку IPT делать оси видимыми.
iptsetpref('ImshowAxesVisible','on')
Создайте демонстрационное изображение и отобразите его.
ph = phantom(128); imshow(ph)

Вычислите fanbeam проекции и отобразите их.
[F,Fpos,Fangles] = fanbeam(ph,250); figure imshow(F,[],'XData',Fangles,'YData',Fpos,... 'InitialMagnification','fit') axis normal xlabel('Rotation Angles (degrees)') ylabel('Sensor Positions (degrees)') colormap(gca,hot), colorbar

Вычислите проекции луча вентилятора для геометрии 'дуги'.
I = ones(100); D = 200; dtheta = 45; [Farc,FposArcDeg,Fangles] = fanbeam(I,D,... 'FanSensorGeometry','arc',... 'FanRotationIncrement',dtheta);
Преобразуйте угловые положения в линейное расстояние вдоль x-prime оси.
FposArc = D*tan(FposArcDeg*pi/180);
Вычислите проекции луча вентилятора для геометрии 'линии'.
[Fline,FposLine] = fanbeam(I,D,... 'FanSensorGeometry','line',... 'FanRotationIncrement',dtheta);
Вычислите соответствующий Радон, преобразовывают.
[R,Rpos]=radon(I,Fangles);
Отобразите эти три проекции при одном конкретном угле поворота. Обратите внимание, что эти три очень похожи. Различия происходят из-за геометрии выборки и числовых приближений, используемых в вычислениях.
figure idx = find(Fangles==45); plot(Rpos,R(:,idx),... FposArc,Farc(:,idx),... FposLine,Fline(:,idx)) legend('Radon','Arc','Line')

I — Введите изображениеВведите изображение в виде 2D числовой или логической матрицы.
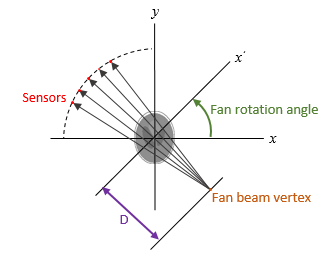
D — Расстояние от поклонника излучает вершину к центру вращенияРасстояние в пикселях от поклонника излучает вершину к центру вращения в виде положительного числа. Центр вращения является центральным пикселем изображения, заданного как floor((size(I)+1)/2)D должно быть достаточно большим, чтобы гарантировать, что вершина луча вентилятора находится вне изображения при всех углах поворота. Смотрите Советы для инструкций по определению D. Фигура иллюстрирует D относительно вершины луча вентилятора для одной геометрии луча вентилятора.
Задайте дополнительные разделенные запятой пары Name,Value аргументы. Name имя аргумента и Value соответствующее значение. Name должен появиться в кавычках. Вы можете задать несколько аргументов в виде пар имен и значений в любом порядке, например: Name1, Value1, ..., NameN, ValueN.
F = fanbeam(I,D,'FanRotationIncrement',5)Угол поворота луча вентилятора постепенно увеличивается в градусах в виде разделенной запятой пары, состоящей из 'FanRotationIncrement' и положительная скалярная величина.

Типы данных: double
Расположение датчика луча вентилятора в виде разделенной запятой пары, состоящей из 'FanSensorGeometry' и одно из следующих значений.
Значение | Значение | Схема |
|---|---|---|
| Датчики расположены с интервалами под равными углами вдоль круговой дуги на расстоянии
|  |
| Датчики расположены с интервалами на равных расстояниях вдоль линии, которая параллельна x' ось. Самый близкий датчик является расстоянием
| 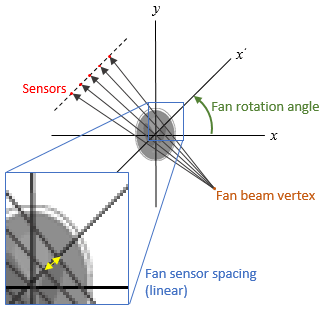 |
Как инструкция, попытайтесь делать D несколько пикселей, больше, чем половина размерности диагонали изображений, вычисленной можно следующим образом.
sqrt(size(I,1)^2 + size(I,2)^2)
Значения возвращены в F числовое приближение проекций луча вентилятора. Алгоритм зависит от Радона, преобразовывают, интерполированный к геометрии луча вентилятора. Результаты варьируются в зависимости от используемых параметров. Можно ожидать более точные результаты, когда изображение будет больше, D больше, и для точек ближе к середине изображения, далеко от ребер.
[1] Kak, A.C., & Slaney, M., Принципы Компьютеризированной Томографической Обработки изображений, ИИ-Пресс, Нью-Йорк, 1988, стр 92-93.
