Настраиваете связь между host и target? Посмотрите Engee: материалы по RCP и работе в реальном времени помогут быстрее перейти от модели к испытаниям, упростить обмен данными и проверку алгоритмов на целевом оборудовании в современной инженерной среде.
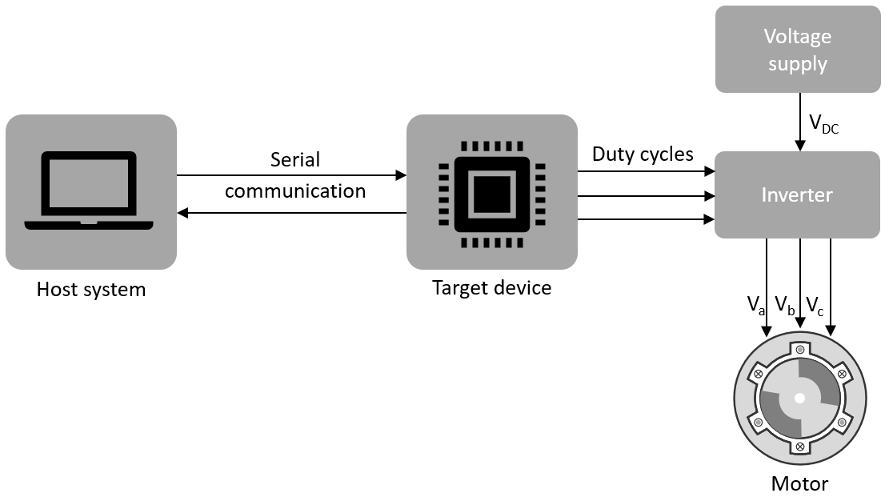
Перейти к документации EngeeMotor Control Blockset™ использует коммуникационный интерфейс между моделью хоста и целевой моделью, чтобы управлять двигателем и наблюдать обратную связь.
Модель хоста является пользовательским интерфейсом для платы оборудования контроллеров. Запустите модель хоста на хосте - компьютере. Прежде чем вы запустите модель хоста на хосте - компьютере, убедитесь, что развернули целевую модель на плате оборудования контроллеров.
Команды модели хоста, средства управления, и обмениваются данными с целевым компьютером. Можно выполнить эти операции с помощью модели хоста, доступной в Motor Control Blockset:
Найдите последовательный порт (COM-порт) в хост-системе. Для получения дополнительной информации смотрите раздел Find Communication Port на этой странице.
Сконфигурируйте скорость последовательного порта и скорость в бодах при помощи блока Serial Setup.
Запустите или остановите двигатель.
Задайте частоту вращения двигателя.
Просмотрите отладку или выходные сигналы, которые хост получает от цели при помощи блоков Отображения и Time Scope.
Целевая модель работает на плате оборудования контроллеров. Разверните целевую модель в оборудование целевого процессора, которое управляет двигателем. Целевая модель связывается с моделью хоста, чтобы получить команды от пользователя (например, команда, чтобы запустить или остановить двигатель). Некоторые общие операции, которые выполняет целевая модель, доступная в Motor Control Blockset:
Последовательная передача с моделью хоста, чтобы получить пользовательские команды и обмениваться двоичными данными.
Считайте данные из положения и датчиков тока, присоединенных к двигателю и инвертору.
Контролируйте скорость вращения двигателя и крутящий момент путем выполнения алгоритмов управления и обработки обратной связи.
Сгенерируйте входные параметры рабочего цикла для инвертора.
Включите быстрые последовательные данные, контролирующие для отладки сигналов.
Хост и целевые модели взаимодействуют при помощи этих блоков Motor Control Blockset, которые включают последовательную передачу:
Последовательный хост получает
Разместите последовательного Setup
Разместите последовательную передачу
Используя эти блоки можно контролировать, управлять и настроить моторную операцию в режиме реального времени. Например, можно просмотреть сигналы отладки, остановить или запустить двигатель и изменить частоту вращения двигателя без повторного развертывания целевой модели.
Модели Motor Control Blockset в качестве примера используют быстрый контрольный алгоритм последовательных данных, который выполняет управление и диагностические операции через модель хоста. Этот алгоритм позволяет вам наблюдать данные из целевого устройства на том же уровне как шаг расчета выполнения (например, частота PWM 20 кГц). Это, в свою очередь, помогает в диагностике и анализе переходных процессов.
Оценочные платы часто обеспечивают последовательную передачу по USB-соединениям, которые включают быстро последовательные передачи. Модели, работающие на аппаратных Instruments™ LaunchPad платах Техаса, отправляют сигналы как Ia и токи Ib по последовательному интерфейсу.
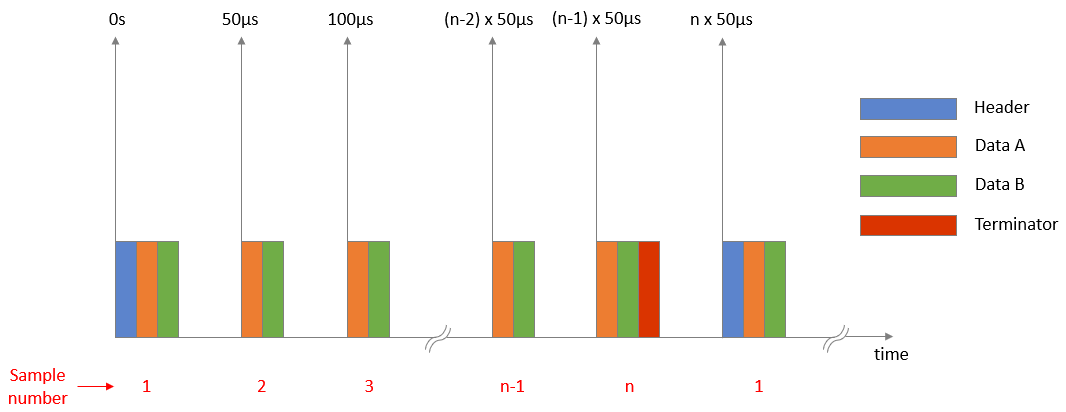
Например, рассмотрите ситуацию, где модель должна произвести два сигнала A и B каждые 50 мкс и отправить их в модель хоста для контроля и отладки. Чтобы выполнить это требование, примеры Motor Control Blockset делят целые данные сигнала на пакеты 600 точек данных. Поэтому пакет от сигнала объединенное с пакетом сигнала B приводит к 1 200 точкам данных. Используя этот подход, целевой компьютер последовательно отправляет пару пакетов данных (от сигналов A и B) к модели хоста. Целевые дальнейшие группы эти пакетные пары в разделы. Каждый раздел начинается с заголовка и заканчивается терминатором строки. После заголовка модель хоста начинает буферизовать точки данных, пока она не получает терминатор строки, после который Simulink® считывает буферизированные данные, которые можно контролировать.
Чтобы считать буферизированные данные, мы выбираем Enable blocking mode и устанавливаем Data size на [2 n] и Sample time к n*50 µs в диалоговом окне параметров блоков Host Serial Receive. Используя эту настройку, блок Host Serial Receive читает 2×n точки данных каждый n×50 µs. Мы выбираем значение для n, таким образом, что модель хоста Simulink может запуститься эффективно в режиме реального времени.
Примеры Motor Control Blockset следуют за этим подходом, потому что Simulink показывает высокую эффективность при обработке больших пакетов данных в низких скоростях передачи данных и целевом компьютере (используемый Motor Control Blockset) эффективно процессы меньшие пакеты данных в более высоких скоростях передачи данных.
Используйте модель хоста, чтобы получить эти сигналы на вашем хосте - компьютере. Примеры Motor Control Blockset, реализующие алгоритм Поля ориентированного управления (FOC) для F28379D LaunchPad, используют mcb_pmsm_foc_host_model_f28379d.slx. Примеры, которые реализуют алгоритм FOC для целей F28069M, используют mcb_pmsm_foc_host_model_f28069m.slx. Motor Control Blockset также предоставляет другие модели хоста для основанных на приложении примеров.
Selecting COM port and baud rate
Выберите соответствующий COM-порт, который совпадает с вашей платой в блоке Serial Setup модели хоста. Настройте скорость в бодах для своей платы:
| Texas Instruments LaunchPad | BaudRate |
|---|---|
F28027 LaunchPad | 3.75e6 |
F28069 LaunchPad | 5.625e6 |
F28377S LaunchPad | 12e6 |
F28379D LaunchPad | 12e6 |
После того, как вы развертываете целевую модель на целевом устройстве, запускаете модель хоста и наблюдаете обновление сигналов отладки на уровне 20 кГц на осциллографе времени. Можно использовать тот же метод, чтобы контролировать другие сигналы на других процессорах.
Примечание
SCI_A обычно соединяется с чипом FTDI, который позволяет последовательные передачи по USB на платах LaunchPad, базовых блоках и платах управления ISO.
Используйте эти шаги, чтобы найти последовательный порт в Диспетчере устройств Windows® PC, после того, как вы соединяете целевой компьютер со своей системой:
Откройте Device Manager на своем Windows PC.
Ищите запись под Ports (COM & LPT), названным USB Serial Port (COMX), где X номер. Можно записать этот номер, чтобы сконфигурировать последовательный блок настройки в модели хоста.

Если вы сталкиваетесь с трудностью при нахождении COM-порта, выполняете эти шаги, чтобы определить COM-порт:
Откройте Device Manager на своем Windows PC.
Ищите запись под Ports (COM & LPT), названным USB Serial Port (COMX), где X номер. Если существует несколько COM-портов, можно отключить и повторно подключить плату C2000 и наблюдать, что обновления в Диспетчере устройств определяют COM-порт.
В качестве альтернативы выполните эти шаги, чтобы определить имя правильного порта для связанного целевого компьютера:
Щелкните правой кнопкой по коммуникационному порту и нажмите Properties.
Во вкладке Details выберите свойство Hardware Ids.
Если порт указывает на следующие идентификаторы, коммуникационный порт принадлежит плате оборудования контроллеров связанного TI C2000™:
VID: 0403
ПИД: A6D0
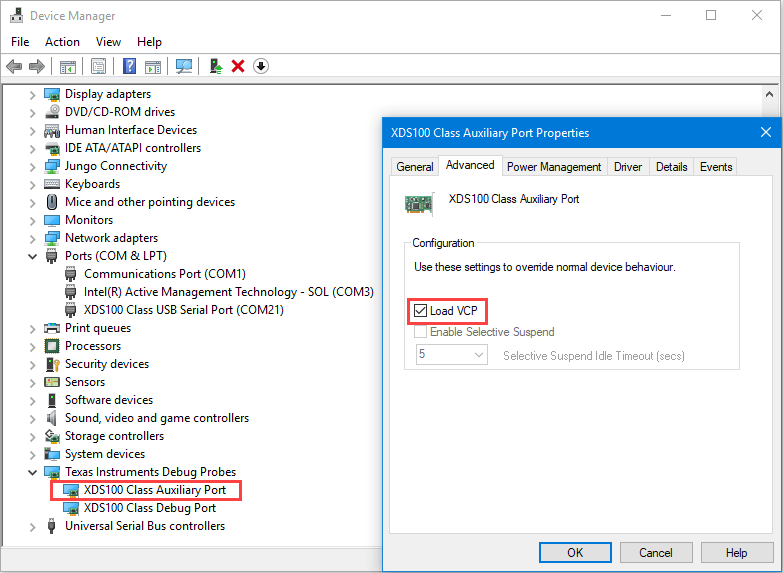
Если вы не видите или находите правильный порт в Ports (COM & LPT), перешли к Texas Instruments Debug Probes и выполняете эти шаги:
Щелкните правой кнопкой по XDS100 Class Auxiliary Port Properties и выберите Properties. Перейдите к вкладке Advanced и выберите Load VCP.
Щелкните правой кнопкой по XDS100 Class Debug Port Properties и выберите Properties. Перейдите к вкладке Advanced и очистите Load VCP.
Отключите и повторно подключите USB-кабель к системе и наблюдайте, что обновления в Диспетчере устройств определяют COM-порт. Система теперь отображает COM-порт, который принадлежит плате оборудования контроллеров связанного TI C2000.
Совет
VCP обозначает Виртуальный COM-порт (для устройств, которые поддерживают последовательный по коммуникации USB).
Если Texas Instruments Debug Probes не появляется в Диспетчере устройств, расширяет Universal Serial Bus controllers в Диспетчере устройств и выполняет эти шаги:
Щелкните правой кнопкой по TI XDS 100 Channel B и выберите Properties. Перейдите к вкладке Advanced и выберите Load VCP.
Щелкните правой кнопкой по TI XDS 100 Channel A и выберите Properties. Перейдите к вкладке Advanced и очистите Load VCP.
Отключите и повторно подключите USB-кабель к системе и наблюдайте, что обновления в Диспетчере устройств определяют COM-порт. Система теперь отображает COM-порт, который принадлежит плате оборудования контроллеров связанного TI C2000.
Если Диспетчер устройств не обнаруживает целевой компьютер, выполните эти шаги:
Проверяйте, что целевой компьютер соединяется с системой.
Проверяйте, установлены ли драйверы устройств правильно. Обычно драйверы устройств установлены с Компоновщиком кода Studio™ (CCS). Проверяйте, установлено ли программное обеспечение CCS в вашей системе. В качестве альтернативы попытайтесь переустановить драйверы устройств, предложенные Texas Instruments.
Проверяйте, неповрежден ли последовательный кабель связи.
Если проблема сохраняется, попытайтесь соединить оборудование с другой системой и проверкой, если Диспетчер устройств обнаруживает оборудование.
Если вы все еще сталкиваетесь с проблемой, целевой компьютер может быть дефектным.
