Ориентированное на поле управление (FOC), также известное как векторное управление, является методом, используемым, чтобы управлять Постоянным магнитом синхронным двигателем (PMSM) и асинхронными двигателями AC (ACIM). FOC предусматривает хорошую возможность управления по полному крутящему моменту и областям значений скорости. Реализация FOC требует преобразования токов статора от стационарной системы координат до системы координат потока ротора (также известный как d-q система координат).
Регулировка скорости и управление крутящим моментом являются обычно используемыми режимами управления FOC. Режим управления положения менее распространен. Большинство приложений тяги использует режим управления крутящего момента, в котором система блока управления приводом следует за ссылочным значением крутящего момента. В режиме регулировки скорости моторный контроллер следует за значением задающей скорости и генерирует ссылку крутящего момента для управления крутящим моментом, которое формирует внутреннюю подсистему. В режиме управления положения контроллер скорости формирует внутреннюю подсистему.
Реализация алгоритма FOC требует оперативной обратной связи положения ротора и токов. Измерьте ток и положение при помощи датчиков. Можно также использовать sensorless методы, которые используют предполагаемые значения обратной связи вместо фактических основанных на датчике измерений.
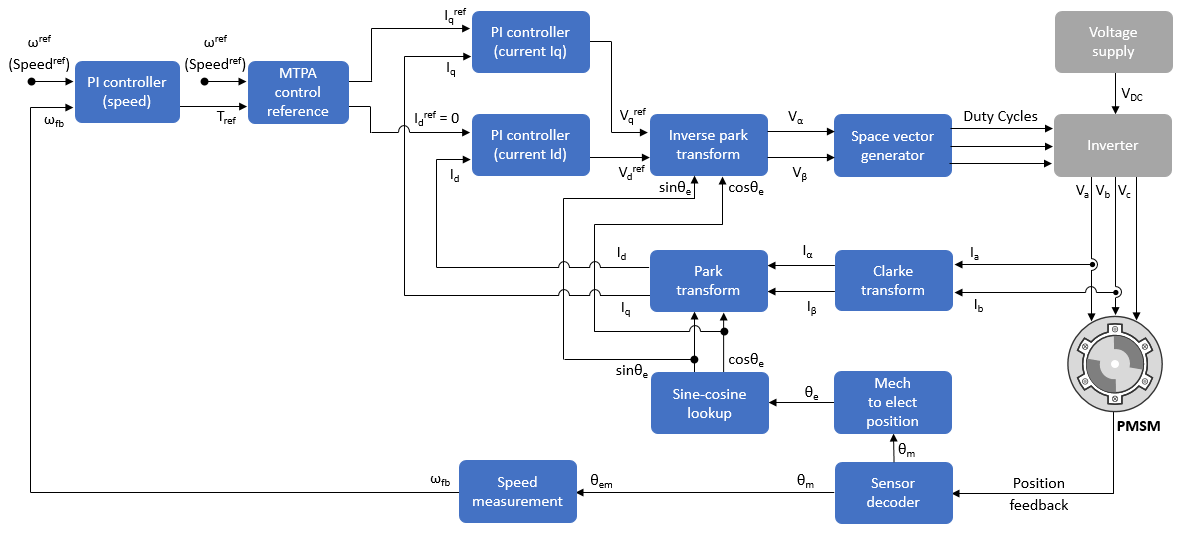
Этот рисунок показывает архитектуру FOC для PMSM. Для подробной системы уравнений и предположений, что использование Motor Control Blockset™, чтобы реализовать FOC PMSM, смотрите Математическую модель PMSM.
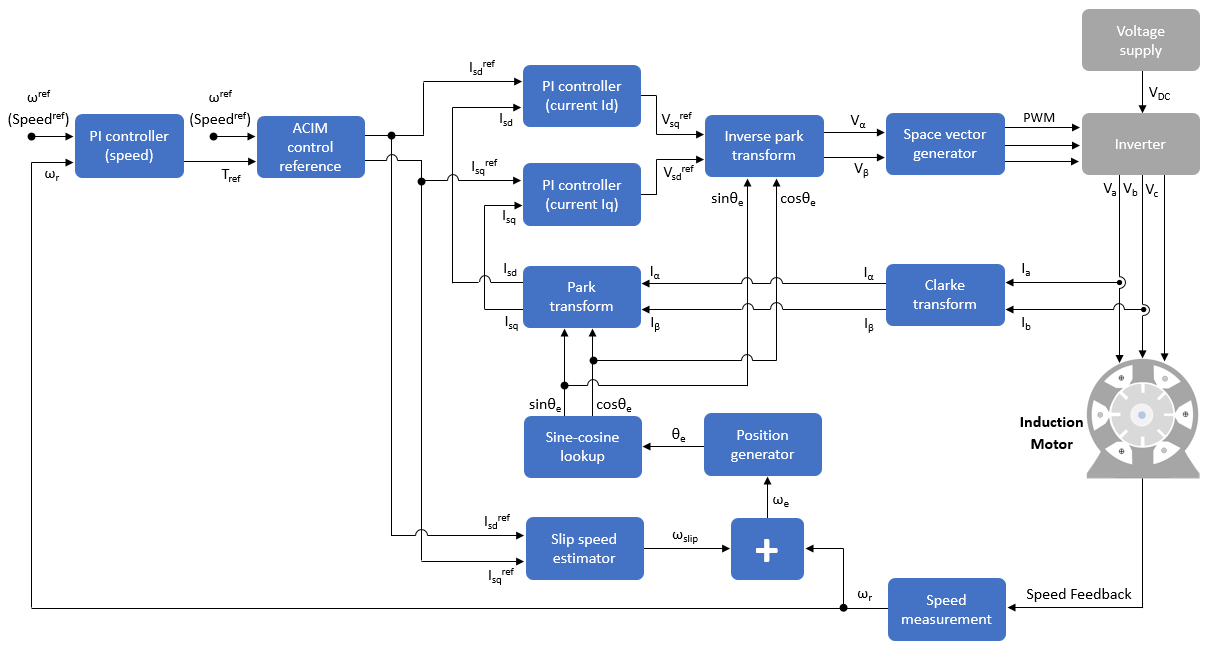
Этот рисунок показывает архитектуру FOC для асинхронного двигателя AC (ACIM). Для подробной системы уравнений и предположений, что использование Motor Control Blockset, чтобы реализовать FOC асинхронного двигателя, смотрите Математическую модель Асинхронного двигателя.