Вычислите усиление DC с обратной связью от выходных воздействий до измеренных выходных параметров, принимающих, что ограничения неактивны в устойчивом состоянии
Используйте эту функцию, чтобы вычислить устойчивое состояние выходная чувствительность замкнутого цикла. Нулевое значение означает, что измеренный объект выход может отследить желаемое выходное заданное значение ссылки.
dcgain = cloffset(MPCobj)dcgain. mpcobj объект MPC, задающий контроллер, для которого вычисляется усиление с обратной связью.
Вычисление эффекта Выходных воздействий
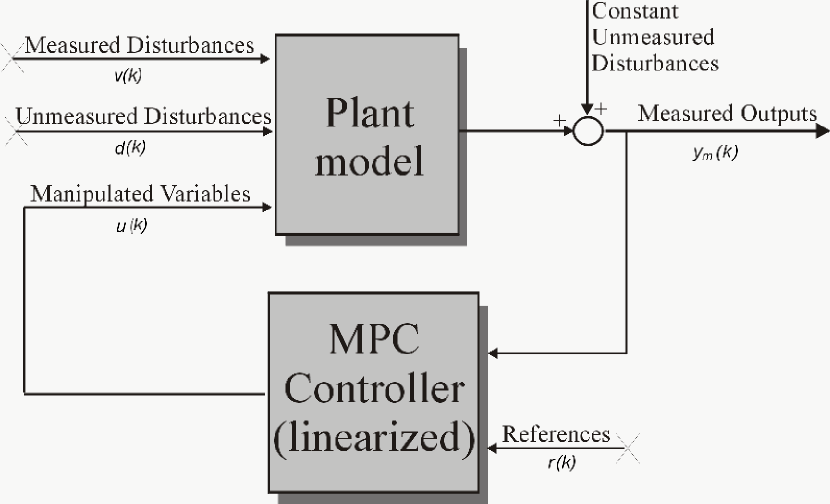
Используя суперпозицию принципа эффектов, усиление вычисляется путем обнуления ссылок, измеренных воздействий и неизмеренных входных воздействий.
