Эта тема показывает, как протестировать существующий прогнозирующий контроллер модели путем добавления его в Simulink® модель.
Откройте свою модель Simulink.
Добавьте блок MPC Controller в модель.
Если ваш контроллер включает измеренные воздействия, добавьте md импортируйте с блоком MPC Controller.
Дважды кликните блок MPC Controller.
В диалоговом окне Block Parameters, на вкладке General, выбирают Measured disturbance (md).
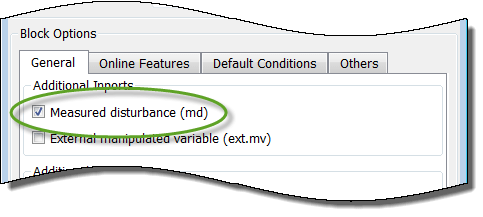
Нажмите OK.
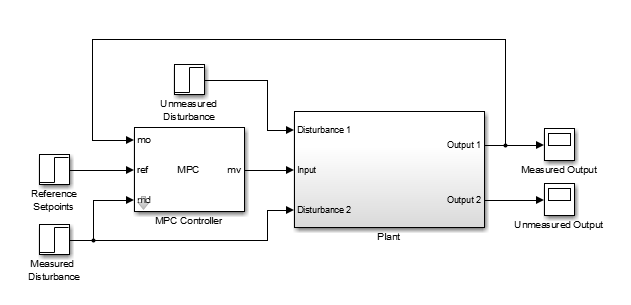
Соедините объект и сигналы контроллера в модели Simulink. Подключение:
Объект вводит к переменной, которой управляют (mv) импорт блока MPC Controller.
Объект измерил выходные параметры к измеренному выходу (mo) импорт блока MPC Controller.
Измеренные воздействия, если таковые имеются, к объекту и к измеренному воздействию (md) импорт блока MPC Controller.
Любые неизмеренные воздействия или неизмеренные выходные параметры к их соответствующему импорту объекта и выходному порту.
Опорные сигналы к ссылке (ref) импорт блока MPC Controller.
Соедините любой сигнал, что требуется визуализировать (такой, например, объект выходные параметры) к Scope (Simulink) блоки.
Задайте контроллер.
Дважды кликните блок MPC Controller.
В диалоговом окне Block Parameters, в поле MPC Controller, задают имя mpc контроллер из MATLAB® рабочая область.
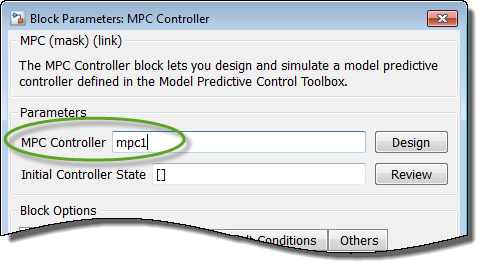
Нажмите OK.
(Необязательно) Измените контроллер.
После определения контроллера в блоке MPC Controller можно изменить контроллер:
Используя MPC Designer:
В диалоговом окне Block Parameters нажмите Design.
В MPC Designer, мелодия параметры контроллера.
Во вкладке MPC Designer, в разделе Result, нажимают Update and Simulate> Update Block Only.
Приложение экспортирует обновленный контроллер в рабочее пространство MATLAB.
Используя команды, чтобы изменить контроллер возражают в рабочем пространстве MATLAB.
Запустите модель Simulink. Проверьте, что симуляция завершает работу без ошибок и что сигналы в цикле ведут себя как ожидалось.
Совет
Если у вас нет модели Simulink вашего объекта, можно сгенерировать тот, который использует контроллер MPC, чтобы управлять его внутренней моделью объекта управления. Для получения дополнительной информации смотрите, Генерируют Модель Simulink от MPC Designer.
mpc | MPC Controller | MPC Designer
