Основная функциональность гидравлического цилиндра двойного действия
Гидравлические цилиндры
Блок Double-Acting Hydraulic Cylinder (Simple) представляет упрощенную версию гидравлического цилиндра двойного действия, разработанного для приложений, где только основная цилиндрическая функциональность должна быть воспроизведена, в обмен на лучшую вычислительную эффективность. По этим причинам такие факторы как сжимаемость жидкости, трение и утечки приняты, чтобы быть незначительными. Жесткие упоры приняты, чтобы быть полностью неэластичными, устранить любые возможные колебания в конце диапазона. Модель особенно подходит для в реальном времени и HIL (оборудование в цикле) симуляция, если такие упрощения приемлемы.
Модель описывается следующими уравнениями:
где
| F | Сила разрабатывается цилиндром |
| v | Скорость штока гидроцилиндра |
| vR, vC | Абсолютные скорости штока гидроцилиндра и корпуса цилиндра, соответственно |
| AA | Площадь базового поршня в стороне порта А |
| AB | Площадь базового поршня в стороне порта B |
| pA | Давление в цилиндрическом порте А |
| pB | Давление в цилиндрическом порте B |
| qA | Скорость потока жидкости через порт А в цилиндр |
| qB | Скорость потока жидкости через порт B от цилиндра |
| x | Положение поршня |
| x0 | Начальное расстояние между поршнем и ограничителем А |
| Fc | Сила жесткого упора |
| xE | Расстояние поршень может переместиться, чтобы полностью расширить от исходного положения |
| xR | Расстояние поршень может переместиться, чтобы полностью отречься от исходного положения |
| Kp | Коэффициент проникновения |
| S | Ход поршня |
Основным различием между этим блоком и блоком Double-Acting Hydraulic Cylinder является представление жесткого упора:
Блок Double-Acting Hydraulic Cylinder использует упругую модель упора, которая является по существу комбинацией пружины и демпфера, соединенного параллельно. Жесткость пружины, которая представляет упругость контакта сталкивающихся тел, очень высока, приводя к высокочастотным низкоамплитудным колебаниям в момент столкновения тел. Эти колебания могут едва быть замечены экспериментально, но они затрудняют процесс числовой симуляцией и обычно уменьшают вычислительную эффективность.
Жесткий упор в блоке Double-Acting Hydraulic Cylinder (Simple) представлен неупругой моделью, которая является по существу вязким демпфером с коэффициентом демпфирования, зависящим от проникновения. Этот коэффициент упоминается как коэффициент проникновения. В неупругой модели никакое колебание не сгенерировано во время удара, приводящего к повышению численной устойчивости и КПД. Но модель неупругого упора имеет функцию, которую необходимо рассмотреть при выборе модели: сталкивающиеся тела медленно продолжают двигаться друг к другу, пока контакт загружается силой сжатия. В реальной жизни это явление похоже на столкновение двух тел, разделенных значительным слоем вязкой жидкости. Требуется некоторое время, чтобы сжать жидкость, прежде чем сами тела вступают в контакт.
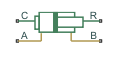
Связи R и C являются портами механического привода, соответствующими штоку гидроцилиндра и корпусу гидроцилиндра, соответственно. Связи A и B являются гидравлическими портами. Порт A соединяет полость A, порт B соединяет полость B.
Можно настроить направление блока параметром Cylinder orientation.
Трение между подвижными частями не учтено.
Эффекты инерции не учтены.
Сжимаемость жидкости не учитывается.
Утечки приняты незначительными.
Жесткие упоры приняты неупругими, как объяснено выше.
Эффективная площадь поршня А. Значением по умолчанию является 0.001 м^2.
Эффективная площадь поршня В. Значением по умолчанию является 5e-4 м^2.
Максимальное перемещение поршня между крайними положениями. Значением по умолчанию является 0.1 m.
Расстояние между поршнем и крайнем положением в начале моделирования. Это значение не может превысить величину хода поршня. Значение по умолчанию 0.
Задает свойство проникновения сталкивающихся тел. Чем выше значение коэффициента, тем меньше тела проникают друг в друга, но более резкое увеличение силы удара. Чтобы узнать значение коэффициента для конкретного приложения, рекомендуется запустить ту же модель с различными моделями жесткого упора (или с различными моделями гидроцилиндра), пока они не показывают близкие результаты. Значением по умолчанию коэффициента является 1e12 N/m / (m/s).
Задает ориентацию гидроцилиндра относительно глобального положительного направления. Цилиндр может быть установлен двумя различными способами, в зависимости от того, порождает ли он силу в положительном или в отрицательном направлении при подаче давления на вход. Если давление, приложенное к порту А, порождает силу в отрицательном направлении, установите параметр на Acts in negative direction. Значением по умолчанию является Acts in positive direction.
Блок имеет следующие порты:
AГидравлический порт, сопоставленный с полостью А гидроцилиндра.
BГидравлический порт, сопоставленный с полостью цилиндра B.
RПорт Механического привода сопоставлен со штоком гидроцилиндра.
CПорт механического привода, связанный с корпусом цилиндра.
Пример Гидравлической Модели Привода С обратной связью для Симуляции В реальном времени показывает, как использовать этот цилиндр наряду с другими блоками, оптимизированными для моделирования в реальном времени и Программно-аппаратной симуляции.
Double-Acting Hydraulic Cylinder | Single-Acting Hydraulic Cylinder | Single-Acting Hydraulic Cylinder (Simple) | Translational Hard Stop | Translational Hydro-Mechanical Converter
