Гидравлический привод клапана двойного действия
Приводы клапана

Используйте блок Hydraulic Double-Acting Valve Actuator в качестве экспериментального привода для направленного, давления или клапанов контроля потока в приложениях, где всеми силами, кроме упругой силы и потребления потока можно пропустить. Привод состоит из двух приводов одностороннего действия, действующих друг против друга. Каждый привод одностороннего действия состоит из поршня, сосредотачивая пружину, и сосредотачивая шайбу. То, когда контролируют давление, применяется к любому гидравлическому порту, только одна сосредотачивающаяся пружина сжата ее шайбой, в то время как другие торцы против корпуса клапана и не порождают силы на золотник. Когда оба контролируют давления, выпущены, пружины обеспечивают шайбы против корпуса клапана и центры золотника между ними. Этот проект позволяет каждому приводу иметь различную пружину, усилие предварительной нагрузки и площадь базового поршня.
Когда давление применилось к поршню, разрабатывает достаточно силы, чтобы преодолеть пружинную предварительную нагрузку, поршень перемещается в противоположное положение, пока это не достигает своего максимального диапазона. Давление, поданное на порт X сдвигов клапан в x- направление, преодолевая пружину, расположенную в емкости Y. Давление, поданное на порт Y, переключает клапан в y- направление, преодолевая пружину, расположенную в этих X емкостях.
Привод симулирован согласно следующим уравнениям:
Если F> = 0,
Если F <0,
где
| F | Обеспечьте действие на клапан |
| s | Перемещение поршня |
| px | Давление в приводе X емкостей |
| py | Давление в приводе Y емкость |
| Ax | Область поверхности клапана в этих X емкостях |
| Ay | Область поверхности клапана в емкости Y |
| strx | Диапазон клапана в x- направление |
| stry | Диапазон клапана в y- направление |
| Fprx | Поместите в камеру X предварительных поджатий пружины |
| Fmaxx | Максимальная сила пружины в полости X |
| Fpry | Поместите в камеру предварительное поджатие пружины Y |
| Fmaxy | Поместите в камеру пружинную максимальную силу Y |
| or | Ориентация привода относительно глобального положительного направления. Если давление применило в порте X перемещений поршень в положительном направлении, or равняется 1. Если давление применило в порте X перемещений поршень в отрицательном направлении, or равняется –1. |
X и Y связей являются гидравлическими портами, сопоставленными с емкостями клапана. Связь P является портом физического сигнала, выход которого соответствует перемещению поршня. Давление, поданное на порт X перемещений поршень в положительном или отрицательном направлении в зависимости от значения параметра Actuator orientation.
Потребление потока, сопоставленное с движением клапана, принято, чтобы быть незначительным.
Инерция, трение и гидравлические осевые усилия приняты, чтобы быть малыми и не учтены.
Зазоры между клапаном и шайбами не учитываются.
Эффективная площадь базового поршня в порте X. Значение параметров должно быть больше нуля. Значением по умолчанию является 2e-4 м^2.
Эффективная площадь базового поршня в порте Y. Значение параметров должно быть больше нуля. Значением по умолчанию является 2e-4 м^2.
Предварительное поджатие пружины в порте X. Значение по умолчанию 0.
Предварительное поджатие пружины в порте Y. Значение по умолчанию 0.
Максимальная сила пружины в полости X. Значение параметров должно быть больше предварительного поджатия пружины. Значением по умолчанию является 50 N.
Поместите в камеру пружинную максимальную силу Y. Значение параметров должно быть больше предварительного поджатия пружины. Значением по умолчанию является 50 N.
Ход поршня в емкости X. Значение параметров должно быть больше или быть равным нулю. Значением по умолчанию является 5e-3 m.
Ход поршня в емкости Y. Значение параметров должно быть больше или быть равным нулю. Значением по умолчанию является 5e-3 m.
Задает ориентацию привода относительно глобального положительного направления. Привод может быть установлен двумя различными способами, в зависимости от того, перемещает ли он поршень в положительном или в отрицательном направлении при подаче давления на вход. Если давление, поданное на порт X перемещений поршень в обратном направлении, установило параметр на Acts in negative direction. Значением по умолчанию является Acts in positive direction.
Блок имеет следующие порты:
XГидравлический порт сопоставил с клапаном X емкостей.
YГидравлический порт, сопоставленный с клапаном Y емкость.
PПорт физического сигнала то выходное перемещение поршня.
Следующий рисунок показывает типичный блок управления насоса переменного смещения, который обеспечивает ограничение обнаружения и давления загрузки (см. [1]). В модуле обнаруживающий загрузку компенсатор варьируется перемещение насоса, чтобы обеспечить предварительно установленный перепад давления через отверстие переменного сечения, в то время как ограничивающий давление компенсатор не позволяет давлению насоса превышать предел давления.
Гидравлический Двигатель, Управляемый Обнаруживающим Загрузку примером Насоса Переменного Смещения, реализует этот тип управления. Следующий рисунок показывает схематический из Блока управления в модели в качестве примера.
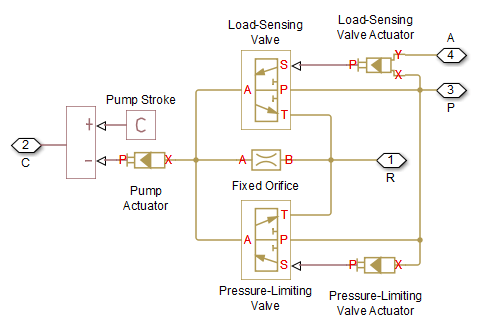
В модели существует три гидравлических привода клапана:
Ограничивающий давление Привод клапана — привод одностороннего действия, который управляет Ограничивающим Давление Клапаном.
Накачайте Привод — привод клапана одностороннего действия, который действует на управляющее устройство перемещения насоса (управление хомутом).
Обнаруживающий загрузку Привод клапана — привод клапана двойного действия, который управляет Обнаруживающим Загрузку Клапаном. Его выход пропорционален различию между давлением насоса (порт P) и давлением загрузки (порт А).
Откройте модель в качестве примера, чтобы видеть установки параметров для блоков.
[1] Ф. Ииппл, руководство проекта гидравлической энергии, Marcel Dekker, Inc., 1995
2-Position Valve Actuator | 3-Position Valve Actuator | Hydraulic Single-Acting Valve Actuator | Proportional and Servo-Valve Actuator
