Переменное смещение двунаправленный гидравлический двигатель
Simscape / Жидкости / Гидравлика (Изотермическая) / Насосы и Двигатели

Блок Variable-Displacement Motor представляет устройство, которое извлекает мощность гидравлической сети (изотермическая жидкость) и поставляет ее вращением в механическую сеть. Перемещение мотора варьируется пропорционально входу физического сигнала, заданному в порте C или D. Используемый точный порт зависит от выбранного варианта блока. Смотрите Порты.
Порты A и B представляют отверстия входа и выхода мотора, соответственно. Порт S представляет приводной вал. Во время нормального функционирования скорость вращения в порте S положительна, если перепад давления от порта A до порта B положителен также. Этот режим работы упомянут здесь как прямое движение.
Режимы работы
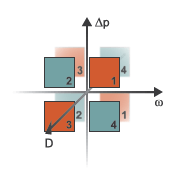
В общей сложности четыре режима работы возможны. Рабочий режим зависит от перепада давления от порта A до порта B (Δp) на скорости вращения в порте S (ω), и на мгновенном объемном смещении компонента (D). Карта Режимов работы сопоставляет режимы с октантами графика Δp-ω-D. Режимы помечены 1–4:
Режим 1: прямое движение — положительный перепад давления генерирует положительную угловую скорость вала.
Режим 2: реверсивный насос — отрицательная угловая скорость вала генерирует отрицательный перепад давления (показанный на рисунке как положительный перепад давления).
Режим 3: реверсивный мотор — отрицательный перепад давления генерирует отрицательную угловую скорость вала.
Режим 4: прямой насос — положительная угловая скорость вала генерирует положительный перепад давления (показанный на рисунке как отрицательный перепад давления).
Время отклика двигателя рассматривается незначительным по сравнению со временем отклика системы. Принято, что Мотор достигает устойчивого состояния почти мгновенно и описан как квазистационарный компонент.
Модель электродвигателя вычисляет потери мощности из-за утечки и трения. Утечка является внутренней и находится между отверстиями входа и выхода мотора только. Блок вычисляет уровень утечек и момент трения с помощью выбора пяти вариантов параметризации потерь. Вы выбираете для использования в блоке варианты параметризации и в Analytical or tabulated data случай, параметр Friction and leakage parameterization.
Параметризация потерь
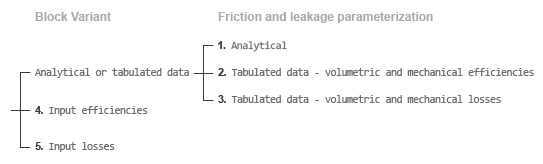
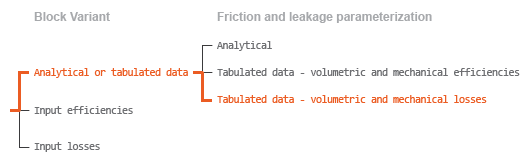
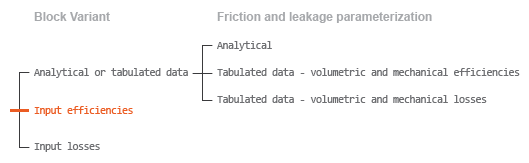
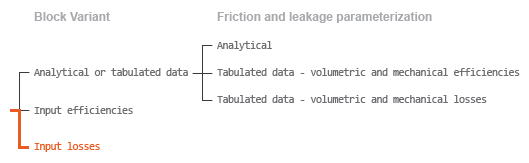
Блок обеспечивает три Simulink® варианты, чтобы выбрать из. Чтобы изменить активный вариант блока, щелкните правой кнопкой по блоку и выберите Simscape> Block choices. Доступные варианты:
Analytical or tabulated data — Получите механический и объемный КПД или потери от аналитических моделей на основе номинальных параметров или от табличных данных. Используйте параметр Friction and leakage parameterization, чтобы выбрать точный входной тип.
Input efficiencies — Обеспечьте механический и объемный КПД непосредственно через входные порты физического сигнала.
Input losses — Задайте механические и объемные потери непосредственно через входные порты физического сигнала. Механическая потеря задана как внутренний момент трения. Объемная потеря задана как уровень внутренних утечек.
Вход рабочего объема зависит от выбранного варианта блока. Если активным вариантом блока является Input efficiencies или Input losses, блок получает мгновенный рабочий объем непосредственно из входа физического сигнала в порте D.
Если активным вариантом блока является Analytical or tabulated data, блок вычисляет мгновенный рабочий объем из перемещения органа управления, заданного в порте C. Этот расчет зависит от установки параметра Displacement parameterization:
Maximum displacement and control member stroke — Вычислите рабочий объем на модульное вращение как линейная функция перемещения органа управления, заданного в порте C.
Displacement vs. control member position table — Вычислите рабочий объем на единичный объем с помощью интерполяции или экстраполяции табличных данных смещения, заданных при дискретных перемещениях органа управления.
Объемный расход, сгенерированный в двигателе,
где:
q является объемным расходом.
Идеал q является идеальным объемным расходом.
Утечка q является расходом внутренних объемных утечек.
Крутящий момент на моторе
где:
τ является крутящим моментом привода.
Идеал τ является идеальным крутящим моментом.
Трение τ является моментом трения.
Идеальный объемный расход
и идеальный крутящий момент мотора
где:
D Находился, сглаживавшее смещение, вычисленное, чтобы удалить числовые разрывы между отрицательными и прямыми вытеснениями.
ω является мгновенной угловой скоростью вращения вала.
Δp является мгновенным перепадом давления между входным и выходным отверстиями.
Смещение насыщения зависит от выбранного варианта блока. Если активным вариантом является Analytical or tabulated data,
где:
D является мгновенным жидким смещением, определенным из входа физического сигнала, заданного в порте C или порте D.
D Max является заданным значением параметров блоков Maximum displacement.
Порог D является заданным значением параметров блоков Displacement threshold for motor-pump transition.
Если активным вариантом является Input efficiencies или Input losses, нет никакой верхней границы на входе смещения, и смещение насыщения уменьшает до:
Расчет внутренних утечек и момента трения кручения зависит от выбранного варианта блока. Если вариантом блока является Analytical or tabulated data, вычисления зависят также от установки параметра Leakage and friction parameterization. Существует пять возможных сочетаний вариантов блока и настроек параметризации.
Случай 1: аналитическое вычисление КПД
Если активным вариантом блока является Analytical or tabulated data и параметр Leakage and friction parameterization устанавливается на Analytical, уровень утечек
и момент трения
где:
K HP является коэффициентом Хагена-Пуазейля для ламинарных течений в трубе. Этот коэффициент вычисляется из заданных номинальных параметров.
TP K является заданным значением параметров блоков Friction torque vs pressure drop coefficient.
τ 0 является заданным значением параметров блоков No-load torque.
Порог ω является пороговой угловой скоростью для перехода режима мотор-насос. Пороговая угловая скорость является внутренним параметром из набора заданных значений параметров блоков Nominal shaft angular velocity.
Коэффициент Хагена-Пуазейля определяется из номинальных параметров компонента жидкости уравнением
где:
Имя ν является параметром Nominal kinematic viscosity. Это - кинематическая вязкость, при которой задан номинальный объемный КПД.
Имя ρ является параметром Nominal fluid density. Это - плотность, в которой задан номинальный объемный КПД.
ρ является фактической плотностью жидкости в присоединенной гидравлической системе (изотермическая жидкость). Эта плотность может отличаться от параметра Nominal fluid density.
Имя ω является параметром Nominal shaft angular velocity. Это - скорость вращения, при которой задан номинальный объемный КПД.
v является жидкой кинематической вязкостью в присоединенной гидравлической гидросистеме.
Имя Δp является параметром Nominal pressure drop. Это - перепад давления, при котором задан номинальный объемный КПД.
η v, Имя является параметром Volumetric efficiency at nominal conditions. Это - объемный КПД, соответствующий заданным номинальным условиям.
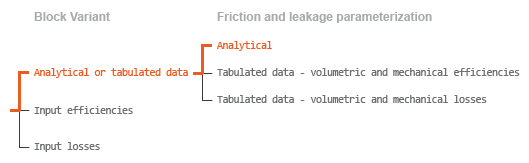
Случай 2: табличные данные КПД
Если активным вариантом блока является Analytical or tabulated data и параметр Leakage and friction parameterization устанавливается на Tabulated data — volumetric and mechanical efficiencies, уровень утечек
и момент трения
где:
α является числовым параметром сглаживания для перехода режима мотор-насос.
Утечка q, Двигатель является расходом утечек в моторном режиме.
Утечка q, Насос является уровнем утечек в режиме насоса.
Трение τ, Насос является моментом трения в режиме насоса.
Трение τ, Двигатель является моментом трения в моторном режиме.
Параметр сглаживания α задан гиперболической функцией
где:
Порог Δp является заданным значением параметров блоков Pressure drop threshold for motor-pump transition.
Порог ω является заданным значением параметров блоков Angular velocity threshold for motor-pump transition.
Порог D является заданным значением параметров блоков Displacement threshold for motor-pump transition.
Расход утечек вычисляется из табличных данных КПД уравнением
в моторном режиме и посредством уравнения
в режиме насоса, где:
η v является объемным КПД, полученным посредством интерполяции или экстраполяции данных о параметре Volumetric efficiency table, e_v(dp,w,D).
Точно так же момент трения вычисляется от табличных данных КПД до уравнения
в моторном режиме и посредством уравнения
в режиме насоса, где:
η m является механическим КПД, полученным посредством интерполяции или экстраполяции данных о параметре Mechanical efficiency table, e_m(dp,w,D).
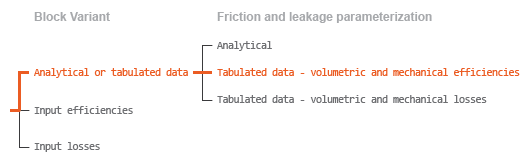
Случай 3: табличные данные потерь
Analytical or tabulated data и параметр Leakage and friction parameterization устанавливается на Tabulated data — volumetric and mechanical losses, уравнение уровня утечек
и уравнение момента трения
где Утечка q (Δp, ω, D Находился) и Трение τ (Δp, ω, D Находился), объемные и механические потери, полученные посредством интерполяции или экстраполяции Volumetric loss table, q_loss(dp,w) и данных о параметре Mechanical loss table, torque_loss (dp,w).
Случай 4: входные параметры физического сигнала КПД
Если активным вариантом блока является Input efficiencies, расчет расхода утечки и момента трения кручения как описано для табличных данных КПД (случай 2). Объемные и механические интерполяционные таблицы КПД заменяются входными параметрами физического сигнала, которые вы задаете через порты EV и EM.
Случай 5: входные параметры физического сигнала потерь
Если вариантом блока является Input losses, расчет расхода утечки и момента трения кручения как описано для табличных данных потерь (случай 3). Объемные и механические интерполяционные таблицы потерь заменяются входными параметрами физического сигнала, которые вы задаете через порты LV и LM.
Сжимаемость жидкости незначительна.
Нагрузки на валу мотора от инерции, трения и сил упругости незначительны.
