Двигатель переменного смещения в изотермической жидкой системе
Simscape / Жидкости / Изотермическая Жидкость / Pumps & Motors

Блок Variable-Displacement Motor (IL) моделирует двигатель со смещением переменного объема. Жидкость может переместиться от порта A до порта B, названного прямым режимом, или от порта B до порта A, названного реверсным режимом. Моторная операция режима происходит, когда существует перепад давления в направлении потока. Операция режима насоса происходит, когда существует перепад давления в направлении потока.
Вращение вала соответствует знаку объема жидкости, перемещающегося через двигатель, который получен как физический сигнал в порте D. Положительное жидкое смещение в D соответствует положительному вращению вала в прямом режиме. Отрицательное жидкое смещение в D соответствует отрицательной угловой скорости вала в прямом режиме.
Режимы работы
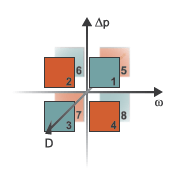
Блок имеет восемь режимов работы. Рабочий режим зависит от перепада давления от порта A до порта B, Δp = p – p B; скорость вращения, ω = ω R – ω C; и жидкое объемное смещение в порте D. Фигура выше сопоставляет эти режимы с октантами Δp-ω-D график:
Режим 1, Прямое движение: Теките из порта A к причинам порта B уменьшение давления от A до B и положительной угловой скорости вала.
Режим 2, Реверсивный насос: Отрицательная угловая скорость вала вызывает увеличение давления от порта B до порта A, и теките из B к порту A.
Режим 3, Реверсивный мотор: Теките из порта B к причинам порта A уменьшение давления от B до A и отрицательной угловой скорости вала.
Режим 4, Прямой насос: Положительная угловая скорость вала вызывает увеличение давления от порта A до порта B, и теките из A к B.
Режим 5, Реверсивный насос: Положительная угловая скорость вала вызывает увеличение давления от порта B до порта A, и теките из B к A.
Режим 6, Прямое движение: Теките из порта A к причинам порта B уменьшение давления от A до B и положительной угловой скорости вала.
Режим 7, Прямой насос: Отрицательная угловая скорость вала вызывает увеличение давления от порта A до порта B, и теките из A к B.
Режим 8, Реверсивный мотор: Теките из B к причинам A уменьшение давления от B до A и положительной угловой скорости вала.
Моторный блок имеет аналитичный, интерполяционная таблица и параметризация физического сигнала. При использовании табличных данных или входного сигнала для параметризации, можно принять решение охарактеризовать моторную операцию на основе КПД или потерь.
Пороговый Pressure drop threshold for motor-pump transition параметров, Angular velocity threshold for motor-pump transition и Displacement threshold for motor-pump transition идентифицируют области, где численно сглаживавший переход потока между моторными операционными режимами может произойти. При давлении и порогах скорости вращения, выберите область перехода, которая обеспечивает некоторое поле для термина перехода, но которая мала достаточно относительно типичного моторного перепада давления и скорости вращения так, чтобы это не влияло на результаты вычисления. Для порога смещения выберите пороговое значение, которое меньше, чем типичный рабочий объем во время нормального функционирования.
Если вы устанавливаете Leakage and friction parameterization на Analytical, блок вычисляет внутреннюю утечку и трение вала от постоянной номинальной стоимости скорости вала, перепада давления, объемного смещения и крутящего момента. Уровень утечек, который коррелируется с перепадом давления по двигателю, вычисляется как:
где:
Именем Δp является p – p B.
ρ в среднем является средней плотностью жидкости.
K является коэффициентом Хагена-Пуазейля за аналитическую потерю,
где:
Именем D является Nominal displacement.
Именем ω является Nominal shaft angular velocity.
Именем η является Volumetric efficiency at nominal conditions.
Именем Δp является Nominal pressure drop.
Крутящий момент, который связан с моторным перепадом давления, вычисляется как:
где:
τ 0 является No-load torque.
k является моментом трения по сравнению с коэффициентом перепада давления в номинальном смещении, которое определяется из Mechanical efficiency at nominal conditions, ηm,nom:
τfr,nom является моментом трения при номинальных условиях:
Δp является перепадом давления между портами A и B.
ω является относительной угловой скоростью вала, или .
При использовании табличных данных для моторных КПД или потерь, можно обеспечить данные для одного или нескольких моторных операционных режимов. Знаки табличных данных определяют операционный режим блока. Когда данные обеспечиваются меньше чем для восьми операционных режимов, блок вычисляет данные о дополнении для другого режима (режимов) путем расширения определенных данных в остающиеся октанты.
Tabulated data - volumetric and mechanical efficiencies параметризацияУровень утечек вычисляется как:
где:
и η v является объемным КПД, который интерполирован от обеспеченных пользователями табличных данных. Термин перехода, α,
где:
Δp является p – p B.
Порогом Δp является Pressure drop threshold for motor-pump transition.
ω является ω R – ω C.
Порогом ω является Angular velocity threshold for motor-pump transition.
Крутящий момент вычисляется как:
где:
и η m является механическим КПД, который интерполирован от обеспеченных пользователями табличных данных.
Tabulated data - volumetric and mechanical losses параметризацияУровень утечек вычисляется как:
где потеря q интерполирована от параметра Volumetric loss table, q_loss(dp,w,D), который основан на предоставленных пользователями данных для перепада давления, угловой скорости вала и жидкого объемного смещения.
Момент трения вала вычисляется как:
где потеря τ интерполирована от параметра Mechanical loss table, torque_loss(dp,w,D), который основан на предоставленных пользователями данных для перепада давления, угловой скорости вала и жидкого объемного смещения.
Когда Leakage and friction parameterization установлен toInput signal - volumetric and mechanical efficiencies, порты EV и EM включены. Внутренняя утечка и трение вала вычисляются таким же образом как Tabulated data - volumetric and mechanical efficiencies параметризация, за исключением того, что η v и η m получены непосредственно в портах EV и EM, соответственно.
Когда Leakage and friction parameterization установлен toInput signal - volumetric and mechanical losses, порты LV и LM включены. Эти порты получают утечку и момент трения как положительные физические сигналы. Уровень утечек вычисляется как:
где:
LV q является утечкой, полученной в порте LV.
p молотит, параметр Pressure drop threshold for motor-pump transition.
Момент трения вычисляется как:
где
τ LM является моментом трения, полученным в порте LM.
ω молотит, параметр Angular velocity threshold for motor-pump transition.
Объемная область значений и область значений механического КПД между пользовательскими заданными минимальными и максимальными значениями. Любые значения ниже или выше, чем эта область значений возьмут минимальные и максимальные заданные значения, соответственно.
Моторная скорость потока жидкости:
где
Крутящий момент двигателя:
где
Механическая мощность, извлеченная валом двигателя:
и моторная гидравлическая мощность:
Чтобы быть уведомленными, если блок действует вне предоставленных табличных данных, можно установить Check if operating beyond the octants of supplied tabulated data на Warning получить предупреждение, если это происходит, или Error остановить симуляцию, когда это происходит. При использовании входного сигнала за объемные или механические потери вы можете быть уведомлены, если симуляция превосходит рабочие режимы параметром Check if operating beyond motor mode.
Можно также контролировать моторную функциональность. Установите Check if pressures are less than motor minimum pressure на Warning получить предупреждение, если это происходит, или Error остановить симуляцию, когда это происходит.
Мотор Переменной Производительности (TL) | Насос переменного смещения (IL) | Двигатель фиксированного смещения (IL)
