Блок питания является, возможно, самым распространенным модулем в гидравлических системах. Его основная функция должна предоставить необходимое количество жидкости под заданным давлением. Существует большое разнообразие проектов блока питания, варьирующихся суммой и типом насосов, движущих сил, клапанов, баков, и т.д. Набор блоков, доступных в библиотеках Simscape™ Fluids™, позволяет вам симулировать практически любую из этих настроек. Этот раздел рассматривает основные подходы в симуляции блоков питания и примеров типичной схематики.
Типичный блок питания гидравлической системы, как показано на следующем рисунке, состоит из фиксированного смещения или насоса переменного смещения, резервуара, регулятора давления и движущей силы, которая управляет гидравлическим насосом.
Типичная гидравлическая силовая установка
В разработке модели блока питания необходимо достигнуть компромисса между робастностью, скоростью симуляции и точностью, подразумевая, что модель должна быть максимально проста обеспечить приемлемую точность в рабочем диапазоне переменных параметров.
Право преимущественной покупки должно симулировать блок питания буквально, как это, воспроизводя все его компоненты. Этот подход проиллюстрирован в Управлении Насосом С обратной связью с Гибким примером Карданного вала. Блок питания состоит из насоса фиксированного смещения, который управляется двигателем через совместимую передачу, регулятором давления и отверстием переменного сечения, которое симулирует системное потребление жидкости. Модель электродвигателя представлена как источник вала вращения скорости вращения на уровне 188 рад/с в нулевом крутящем моменте. Нагрузка на вал уменьшает скорость с коэффициентом промаха 1,2 (rad/s)/Nm. Нагрузка на ведущий вал измеряется с датчиком крутящего момента. Вал между двигателем и насосом принят, чтобы быть совместимым и симулирован с вращательной пружиной и демпфером.
Симуляция запускается с открытого отверстия переменного сечения, который приводит к низкому системному давлению и максимальной скорости потока жидкости, идущей в систему. Отверстие начинает закрываться в 0,5 с и закрывается полностью в 3 с. Выходные сборки давления вплоть до него достигают установки давления предохранительного клапана (75e5 Па) и обеспечены на этом уровне клапаном. В 3 с отверстие переменного сечения начинает открываться, таким образом возвращая систему в ее начальное состояние.
Можно реализовать значительно более сложную модель движущей силы следующим шаблон, используемый в примере. Например, вал может быть представлен несколькими сегментами и промежуточными подшипниками. Модель движущей силы может быть более всесторонней, составляя ее тип (DC или электродвигатель AC, дизельный или бензиновый двигатель), характеристики, тип управления, и так далее. Кроме того, комплексная механическая передача, управляемая дизелем или двигателем внутреннего сгорания бензина, смоделированным с помощью программного обеспечения Simscape Driveline™, может быть объединена с моделью Simscape Fluids гидравлического фрагмента блока питания.
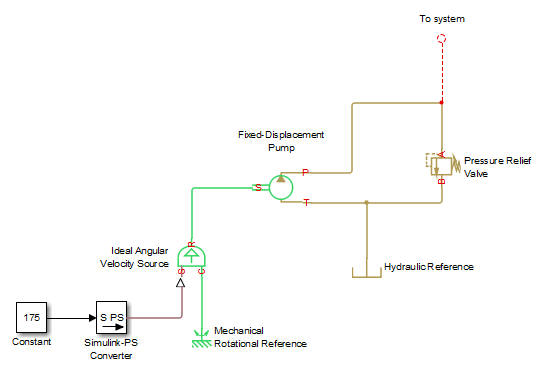
В зависимости от вашего конкретного приложения можно смочь упростить модель блока питания практически без потери в точности. Основными факторами, которые будут рассмотрены в этом процессе, является ведущая величина изменения угловой скорости вала и системная область значений изменения давления. Если скорость вращения движущей силы остается практически постоянной в течение симулированного времени или варьируется незначительно относительно его установившегося значения, целая ведущая подсистема вала может быть заменена Идеальным Исходным блоком Скорости вращения, выход которого установлен в установившееся значение, когда это показывают на следующем рисунке.
Используя идеальный исходный блок скорости вращения в моделировании блоков питания
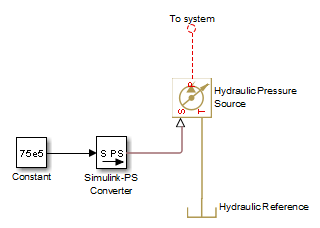
Кроме того, если производительность насоса превышает жидкие требования системы в любом случае, давление выхода насоса остается практически постоянным и близко к установке давления регулятора давления. Если это предположение верно и приемлемо, целый блок питания может уменьшаться до идеального Блока Источника Гидравлического Давления, как показано на следующем рисунке.
Используя Блок Источника Гидравлического Давления в моделировании блоков питания
Эти два предыдущих примера демонстрируют, что использование идеальных источников является мощными средними значениями сокращения сложности моделей. Однако необходимо проявить экстремальную осторожность каждый раз, когда вы используете идеальный источник вместо действительного насоса. Замена возможна, только если существует обеспечение, что управляемый параметр (скорость вращения в первом примере и давление во втором примере) остается постоянным. Если дело обстоит не так, блок питания, представленный идеальным источником, произведет значительно больше энергии, чем ее симулированный физический дубликат, таким образом делая результаты симуляции неправильными.
