Редуктор скорости высокого отношения на основе циклоидального дискового движения
Simscape / Автомобильная трансмиссия / Механизмы

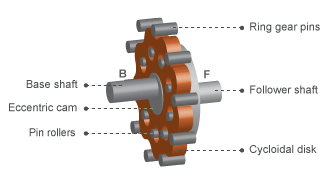
Блок Cycloidal Drive представляет компактное, высокое отношение, механизм сокращения скорости, который содержит четыре ключевых компонента:
Эксцентриковый бегунок
Циклоидальный диск
Корпус кольцевого механизма
Прикрепите ролики
Эксцентриковый бегунок, который расширяет от основного вала, находится в циклоидальном диске. Этот диск сцепляется с корпусом кольцевого механизма. Ролики контакта, которые расширяют от вала последователя, находятся в соответствии с отверстиями на циклоидальном диске.
Во время нормального функционирования основной вал управляет эксцентриковым бегунком. Бегунок вращается в циклоидальном диске, заставляя его вращаться в эксцентриковом шаблоне об оси смещения. Когда это перемещается, циклоидальный диск затрагивает внутренние зубы корпуса кольцевого механизма. Внутренние запутывающие реверсы вращательное скоростное направление.
Прикрепите расширение роликов с вращательного движения передачи отверстий циклоидального диска на вал последователя. Этот вал вращается в противоречии с основным валом в очень сниженной скорости. Большое отношение сокращения следует из почти равного циклоидального диска и кольцевых зубных чисел механизма. Эффективное отношение сокращения механизма
где:
r является отношением сокращения механизма.
nR является количеством зубов на кольцевом механизме.
nC является количеством зубов на циклоидальном диске.
Отношение сокращения механизма ограничивает скорости вращения основы и валов последователя согласно выражению
где:
ωF является скоростью вращения вала последователя.
ωC является скоростью вращения основного вала.
Отношение сокращения механизма также ограничивает крутящие моменты, действующие на основу и валы последователя, согласно выражению
где:
TB является крутящим моментом привода в основном вале.
TF является крутящим моментом привода в вале последователя.
Tf является потерей крутящего момента из-за трения. Для получения дополнительной информации смотрите Механизмы Модели с Потерями.
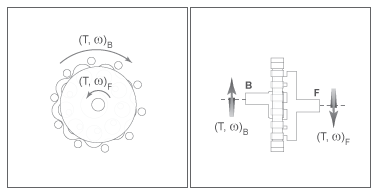
Рисунок показывает циклоидальный диск впереди и виды сбоку. Кинематика системы приводов вызывает реверсирование основы и угловых скоростей вала последователя так, чтобы эти два вала вращались в противоположных направлениях.
Циклоидальный диск может действовать в реверсном режиме, то есть, со степенью, текущей из вала последователя к основному валу. В реверсном режиме КПД передачи крутящего момента обычно незначительны. Можно настроить КПД путем изменения значения параметра Efficiency from follower shaft to base shaft.
Можно установить запутывающую модель трения потерь на:
No meshing losses - suitable for HIL simulation, который игнорирует потери, чтобы позволить в течение HIL-способного времени вычисления.
Constant efficiency, который является установкой трения по умолчанию для версий блока до R2020b. В этом случае вы задаете КПД компонента, который остается постоянным в течение симуляции
Temperature-dependent efficiency, какой температурный зависимый моделей КПД компонента путем создания 1D интерполяционной таблицы на основе вектора Temperature и данного вектора КПД компонента. Эта установка также, включает тепловой порт H сохранения. Этот порт получает тепловой поток в блок, который переводится в температуру блока согласно параметру Thermal mass механизма.
Можно смоделировать эффекты теплового потока и изменения температуры путем включения дополнительного теплового порта. Чтобы включить порт, установите Friction model на Temperature-dependent efficiency.
Используйте настройки Variables, чтобы установить приоритет и начальные целевые значения для переменных в блоках перед симуляцией. Для получения дополнительной информации смотрите Приоритет Набора и Начальную Цель для Переменных в блоках.
Harmonic Drive | Simple Gear | Simple Gear with Variable Efficiency
