Фрикционный тормоз с два вертелся обувь, диаметрально расположенная о вращающемся барабане с инициированным сбоем
Simscape / Автомобильная трансмиссия / Brakes & Detents / Вращательный

Блок Double-Shoe Brake представляет фрикционный тормоз два, вертелся твердая обувь, которая нажимает против вращающегося барабана, чтобы произвести торможение. Твердая обувь находится внутри или снаружи вращающегося барабана в диаметрально противоположной настройке. Положительная сила приведения в действие заставляет твердую обувь нажимать против вращающегося барабана. Вязкий и трение контакта между барабаном и твердыми поверхностями обуви заставляют вращающийся барабан замедляться.
Тормоза двойной обуви предоставляют высокому тормозному моменту маленькие отклонения привода в приложениях, которые включают моторные транспортные средства и некоторое тяжелое машиностроение. Модель использует простую параметризацию с с готовностью доступной геометрией тормоза и параметрами трения.
Можно также позволить дать сбой. Когда сбой произойдет, пояс породит заданную пользователями силу. Отказы могут произойти в требуемое время или из-за внешнего триггера в порте T.
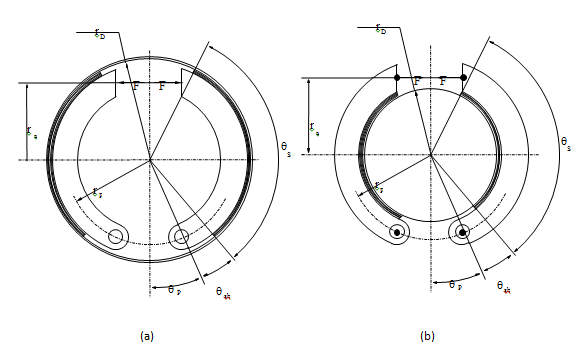
В схематическом, a) представляет внутренний тормоз двойной обуви и b) представляет внешний тормоз двойной обуви. В обеих настройках положительная сила приводов F сводит обувь и поверхности трения барабана. Результатом является момент трения, который вызывает замедление вращающегося барабана. Нуль и отрицательные силы не сводят обувь и поверхности трения барабана и производят нулевой тормозной момент.
Модель использует приближение длинной обуви. Уравнения для момента трения, который разрабатывает начальная и конечная обувь:
где для ,
и для ,
Где:
TLS является моментом привода, который разрабатывает ведущая обувь.
TTS является моментом привода, который разрабатывает запаздывающая обувь.
μ является эффективным коэффициентом трения контакта.
pa является максимальным линейным давлением в ведущем контакте барабана обуви.
pb является максимальным линейным давлением в запаздывающем контакте барабана обуви.
rD является радиусом барабана.
θsb является углом начала обуви.
θs является углом промежутка обуви.
θa является углом от контакта стержня до максимальной точки давления.
c является продолжительностью руки цилиндрической силы относительно контакта стержня.
rp является радиусом местоположения контакта.
θp является углом местоположения контакта стержня.
ra является радиусом местоположения привода.
В модели принимается, что только трение Кулона действует в контакте поверхности барабана обуви. Обнулите относительную скорость между барабаном, и обувь производит нулевое трение Кулона. Чтобы избежать разрыва при нулевой относительной скорости, содействующая формула трения использует гиперболическую функцию
где:
μ является эффективным коэффициентом трения контакта.
μCoulomb является коэффициентом трения контакта.
ωshaft является скоростью вала.
ωthreshold является порогом скорости вращения.
Балансировка моментов, которые действуют на каждую обувь относительно контакта, дает к давлению, действующему в контакте поверхности барабана обуви. Уравнения для определения баланса моментов для ведущей обуви
и
где:
F является силой приводов.
MN является моментом, действуя на ведущую обувь из-за нормальной силы.
MF является моментом, действуя на ведущую обувь из-за силы трения.
c является продолжительностью руки цилиндрической силы относительно контакта стержня.
pa является максимальным линейным давлением в поверхности контакта барабана обуви.
rp является радиусом местоположения контакта.
θp является углом местоположения контакта стержня.
ra является радиусом местоположения привода.
Модель не симулирует тормоза с автоблокировкой. Если геометрия тормоза и параметры трения вызывают условие с автоблокировкой, модель производит ошибку симуляции. Тормоз самоблокирует, если момент трения превышает момент из-за нормальных сил, то есть, когда MF> MN.
Баланс моментов для запаздывающей обуви
Сетевой тормозной момент
где μvisc является коэффициентом вязкого трения.
Когда отказы включены, сила пояса прикладывается в ответ на одну или оба из этих триггеров:
Время симуляции — Сбой происходит в требуемое время.
Поведение симуляции — Сбой происходит в ответ на внешний триггер. Это отсоединяет порт T.
Если триггер отказа происходит, входная сила заменяется значением Belt force when faulted для остатка от симуляции. Значение 0 подразумевает, что никакое торможение не произойдет. Относительно большое значение подразумевает, что тормоз застревает.
Можно установить блок выпускать дефектную ведомость как предупреждающее сообщение или сообщение об ошибке в Средстве просмотра Диагностики Simulink параметром Reporting when fault occurs.
Можно смоделировать эффекты теплового потока и изменения температуры путем осушения дополнительного теплового порта. Чтобы осушить порт, в настройках Friction, устанавливают параметр Thermal Port на Model. Осушение порта также отсоединяет или изменяет значение по умолчанию для этих связанных настроек, параметров и переменных:
Friction> Temperature
Friction> Static friction coefficient vector
Friction> Coulomb friction coefficient vector
Friction> Contact friction coefficient vector
Thermal Port> Thermal mass
Variables> Temperature
Используйте настройки Variables, чтобы установить приоритет и начальные целевые значения для переменных в блоках перед симуляцией. Для получения дополнительной информации смотрите Приоритет Набора и Начальную Цель для Переменных в блоках.
Переменные настройки отображаются только, когда в настройках Friction параметр Thermal port устанавливается на Model.
Свяжитесь с углами, меньшими, чем 45 ° приводят к менее точным результатам.
Тормоз использует приближение длинной обуви.
Геометрия тормоза не самоблокирует.
Модель не составляет потребление потока привода.
Band Brake | Loaded-Contact Rotational Friction | Rotational Detent
