Механизм для затухания поступательных колебаний
Simscape / Автомобильная трансмиссия / Couplings & Drives

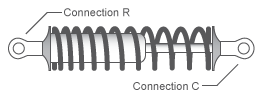
Блок Shock Absorber представляет систему пружинного демпфера, обычно раньше ослаблял вибрацию в механических системах. Внутренняя сила действует между портами R и C. Эта сила является суммой пружинной жесткости, затухания, трения Кулона и вкладов жесткого упора. Все вклады силы являются дополнительными.
Блок Shock Absorber использует модели этих блоков:
| Блок | Вклад | Библиотека |
|---|---|---|
| Loaded-Contact Translational Friction | Трение Кулона | Simscape / Driveline / Brakes & Detents / Translational |
| Rotational Damper | Затухание | Simscape / Foundation Library / Mechanical / Translational Elements |
| Rotational Spring | Пружина | |
| Rotational Hard Stop | Жесткий упор |
Включая жесткий упор и трение Кулона улучшает точность модели, но уменьшает скорость симуляции. Для получения дополнительной информации смотрите Эффективность Симуляции Автомобильной трансмиссии.
Механический поступательный порт сопоставил с ползунком, который перемещается между упорами установленный на случае.
Механический поступательный порт сопоставлен со стержнем.
Введите значение вязкой пружинной постоянной жесткости, k. Значением по умолчанию является 1e4
N/m. Значение должно быть больше или быть равным нулю.
Введите значение вязкого постоянного затухания, b. Значением по умолчанию является 1e2
m/s. Значение должно быть больше или быть равным нулю.
Введите значение силы трения Кулона. Устанавливание значения к 0 устраняет вклад силы трения Кулона. Это улучшает скорость симуляции, делая модель более подходящей для Программное-аппаратного тестирования. Значение по умолчанию 0
N. Значение должно быть больше или быть равным нулю.
Введите значение статического/кинетического отношения трения, которое является Fs/Fk. Значение должно быть больше того. Значением по умолчанию является 1.1. Значение должно быть больше или быть равно одному.
Введите значение относительной скорости, ниже которой порты R и C блокируют и переводят вместе. Значением по умолчанию является 0.001
m/s. Значение должно быть больше нуля.
Включайте или исключите силу жесткого упора путем выбора одной из этих опций:
No hard stops — Suitable for HIL simulation — Чтобы улучшить скорость симуляции исключением вклада силы жесткого упора, выберите эту опцию по умолчанию.
Compliant hard stops — Чтобы улучшить точность модели включением вклада силы жесткого упора, выберите эту опцию. Выбирание этой опции включает другие параметры.
Верхнее положение жесткого упора, UB. Прямое вытеснение вне верхней границы активирует силу контакта жесткого упора. Значением по умолчанию является 0.1
m. Значение должно быть больше нижней границы.
Выбор Compliant hard stops для Hard stop параметр включает этот параметр.
Более низкое положение жесткого упора, LB. Отрицательное смещение вне нижней границы активирует силу контакта жесткого упора. Значением по умолчанию является -0.1
m. Значение должно быть меньшим, чем верхняя граница.
Выбор Compliant hard stops для Hard stop параметр включает этот параметр.
Введите значение постоянной жесткости жесткого упора, kHS. Значением по умолчанию является 1e6
N/m. Значение должно быть больше или быть равным нулю.
Выбор Compliant hard stops для Hard stop параметр включает этот параметр.
Введите значение жесткого упора, ослабляющего постоянный, bHS. Этот параметр задает рассеивающееся свойство сталкивающихся тел. Чем больше значение параметра, тем больше энергии рассеивается во время взаимодействия. Значением по умолчанию является 1e4
N/(m/s). Значение должно быть больше нуля.
Выбор Compliant hard stops для Hard stop параметр включает этот параметр.
Выберите модель жесткого упора:
Stiffness and damping applied smoothly through transition region, damped rebound — Задайте область перехода, в которой сила масштабируется от нуля. В конце области перехода применяются полная жесткость и затухание. Эта модель имеет затухание, примененное на восстановление, но это ограничивается значением силы жесткости. В этом смысле затухание может уменьшать или устранить силу, обеспеченную жесткостью, но никогда не превышать его. Все уравнения являются гладкими и не производят нулевых пересечений.
Выбирание этой опции включает Transition region параметр.
Full stiffness and damping applied at bounds, undamped rebound — Эта модель имеет полную жесткость и затухание прикладного с ударом в верхних и нижних границах без затухания на восстановлении. Уравнения не производят нулевых пересечений, когда скорость изменяет знак, но существует основанный на положении нуль, пересекающийся в границах. Наличие никакого затухания на восстановлении помогает продвинуть ползунок мимо этого положения быстро. Эта модель имеет нелинейные уравнения.
Full stiffness and damping applied at bounds, damped rebound — Эта модель имеет полную жесткость и затухание прикладного с ударом в верхних и нижних границах с затуханием прикладного на восстановлении также. Уравнения переключаются линейные, но производят основанные на положении нулевые пересечения. Используйте эту модель жесткого упора если simscape.findNonlinearBlocks указывает, что это - блок, который препятствует тому, чтобы целая сеть была переключена линейная.
Выбор Compliant hard stops для Hard stop параметр включает этот параметр.
Область, где сила увеличена от нуля до полного значения. В конце области перехода применяются полная жесткость и затухание. Значением по умолчанию является 0.1
mm.
Выбор Stiffness and damping applied smoothly through transition region, damped rebound поскольку Hard stop model включает этот параметр.
Введите начальное значение пружинной деформации. Значение по умолчанию 0
m.
Для оптимальной эффективности симуляции используйте Hard Stops> настройка по умолчанию параметра Hard stop, No hard stops - Suitable for HIL simulation.
