Коническая муфта, муфта собаки и поступательный стопор, собранный, чтобы обеспечить сглаженное обязательство механизма
Simscape / Автомобильная трансмиссия / Муфты
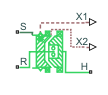
Блок представляет синхронизатор, который содержит муфту собаки, коническую муфту и поступательный стопор. Рычажное устройство сдвига сначала переводит, чтобы затронуть коническую муфту. Фрикционный крутящий момент заставляет рычажное устройство сдвига и конический вал муфты вращаться на равной скорости. Когда сила, действующая на рычажное устройство сдвига, превышает силу стопора, муфта собаки может участвовать.

Схематическое иллюстрирует синхронизатор в разъединенном состоянии. В этом состоянии звонок (R) и концентратор (H) валы может вращаться независимо на различных скоростях. Чтобы синхронизировать звонок и скорости вала концентратора, рычажное устройство сдвига (S) переводит к валу концентратора, чтобы затронуть коническую муфту. Поверхности трения конической муфты производят фрикционный крутящий момент, который компенсирует скорости вращения валов концентратора и звонка. Зубы муфты собаки (T) могут участвовать, когда поступательная сила, действующая на рычажное устройство сдвига, превышает пиковую силу стопора. Пиковая сила стопора должна позволить достаточному количеству времени и нормальной силе компенсировать звонок и скорости вала концентратора так, чтобы муфта собаки могла участвовать.
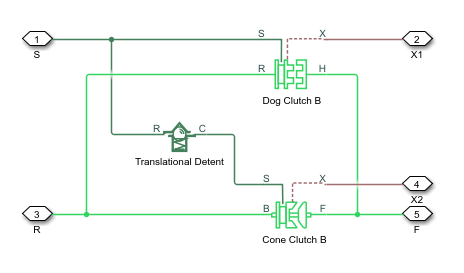
Модель реализует Dog Clutch, Cone Clutch и блоки Translational Detent. Обратитесь к каждой странице с описанием блока для получения дополнительной информации о соответствующей функции блока. Можно использовать аналогичный подход к настроенным версиям модели синхронизатора. Одним примером является Передача (Подробная) подсистема в модели sdl_vehicle_manual_transmission.
Связи R и H являются портами сохранения вращательного механического устройства, которые представляют звонок (R) и концентрируют (H), соответственно. Связь S является портом механической передачи, который представляет кольцевой указатель переключателя.
X1 связей и X2 являются физическим сигналом выходные параметры, которые сообщают о положениях рычажного устройства сдвига муфты собаки и конической муфты, соответственно. Положения рычажного устройства сдвига являются нулем, когда муфта полностью расцеплена. Когда муфта собаки полностью занята, положение рычажного устройства сдвига муфты собаки имеет величину, равную сумме разрыва кольцевого концентратора муфты собаки и зубной высоты. Когда коническая муфта полностью занята, коническое положение рычажного устройства сдвига муфты имеет величину, равную коническому разрыву кольцевого концентратора муфты.
Можно смоделировать эффекты теплового потока и изменения температуры через дополнительный тепловой порт сохранения. По умолчанию тепловой порт скрыт. Чтобы осушить тепловой порт, в настройках Clutch, выбирают температурно-зависимую скалистую вершину установки параметр Friction model. Задайте связанные тепловые параметры для компонента.
Модель не составляет эффекты инерции. Можно добавить блок Simscape™ Inertia в каждом порте, чтобы добавить инерцию в модель синхронизатора.
X1 — Перевод муфты собакиВыходной порт физического сигнала, который измеряет величину перевода муфты собаки.
X2 — Конический перевод муфтыВыходной порт физического сигнала, который измеряет величину конического перевода муфты.
H — Сожмите концентраторПорт сохранения вращательного механического устройства сопоставлен с концентратором муфты
R — Звонок муфтыПорт сохранения вращательного механического устройства сопоставлен со звонком муфты.
S — Переключите рычажное устройствоПорт сохранения вращательного механического устройства сопоставлен с рычажным устройством сдвига.
T — Тепловой потокТепловой порт сохранения сопоставлен с тепловым потоком.
Этот порт отображается только, когда в настройках Friction параметр Friction model устанавливается на Temperature-dependent friction coefficients или Temperature and velocity-dependent friction coefficients.
Таблица показывает, как заданные опции для параметров в обоих настройки Cone Clutch и Dog Clutch влияют на видимость:
Параметры в Cone Clutch, Dog Clutch и настройках Initial Conditions
Настройки Thermal Port
Тепловой порт T
Чтобы изучить, как считать таблицу, смотрите Зависимости от Параметра.
Зависимости от параметров блоков Synchronizer
| Настройки | Параметры и опции | |||||
|---|---|---|---|---|---|---|
| Cone Clutch | Contact surface maximum diameter | |||||
| Contact surface minimum diameter | ||||||
| Cone half angle | ||||||
| Friction model | ||||||
Fixed kinetic friction coefficient | Velocity-dependent kinetic friction coefficient | Temperature-dependent friction coefficients | Temperature and velocity-dependent friction coefficients | |||
| - | - | Отсоединяет:
| Отсоединяет:
| |||
| - | Relative velocity vector | Relative velocity vector | ||||
| - | - | Temperature vector | Temperature vector | |||
| Static friction coefficient | Static friction coefficient vector | Static friction coefficient vector | Static friction coefficient matrix | |||
| Kinetic friction coefficient | Kinetic friction coefficient vector | Kinetic friction coefficient vector | Kinetic friction coefficient matrix | |||
| - | Friction coefficient interpolation method | Friction coefficient interpolation method | Friction coefficient interpolation method | |||
| - | Friction coefficient extrapolation method | Friction coefficient extrapolation method | Friction coefficient extrapolation | |||
| Velocity tolerance | Velocity tolerance | Velocity tolerance | Velocity tolerance | |||
| Threshold force | Threshold force | Threshold force | Threshold force | |||
| Dog Clutch | Torque transmission model | Torque transmission model | - | - | ||
Friction clutch approximation - Suitable for HIL and linearization | Dynamic with backlash | Friction clutch approximation - Suitable for HIL and linearization | Dynamic with backlash | - | - | |
| - | - | - | - | Temperature vector | Temperature vector | |
| Maximum transmitted torque | - | Maximum transmitted torque | - | Maximum transmitted torque vector | Maximum transmitted torque vector | |
| - | - | - | - | Interpolation method | Interpolation method | |
| - | - | - | - | Extrapolation method | Extrapolation method | |
| Clutch teeth mean radius | Clutch teeth mean radius | Clutch teeth mean radius | Clutch teeth mean radius | Clutch teeth mean radius | Clutch teeth mean radius | |
| - | Number of teeth | - | Number of teeth | |||
| Rotational backlash | Rotational backlash | |||||
| - | Torsional stiffness | - | Torsional stiffness | |||
| - | Torsional damping | - | Torsional damping | |||
| - | Tooth-tooth friction coefficient | - | Tooth-tooth friction coefficient | |||
| Initial Conditions | Initial state | Initial state | Initial state | Initial state | Initial state | Initial state |
| Dog clutch initial shift linkage position | Dog clutch initial shift linkage position | Dog clutch initial shift linkage position | Dog clutch initial shift linkage position | Dog clutch initial shift linkage position | Dog clutch initial shift linkage position | |
| Cone clutch initial shift linkage position | Cone clutch initial shift linkage position | Cone clutch initial shift linkage position | Cone clutch initial shift linkage position | Cone clutch initial shift linkage position | Cone clutch initial shift linkage position | |
| - | Initial dog clutch ring-hub offset angle | - | Initial dog clutch ring-hub offset angle | - | - | |
| Thermal Port | - | - | - | - | Thermal mass | Thermal mass |
| - | - | - | - | Initial temperature | Initial temperature | |
Contact surface maximum diameter — Наружный диаметрmm (значение по умолчанию) | положительная скалярная величинаВнешний конический диаметр do.
Contact surface minimum diameter — Внутренний диаметрmm (значение по умолчанию) | положительная скалярная величинаВнутренний конический диаметр di.
Cone half angle — Коническая половина углаdeg (значение по умолчанию) | положительная скалярная величинаНаполовину вводный угол α конической геометрии.
Friction model — Модель FrictionFixed kinetic friction coefficient (значение по умолчанию) | Velocity-dependent kinetic friction coefficient | Temperature-dependent friction coefficients | Temperature and velocity-dependent friction coefficientsМетод параметризации, чтобы смоделировать кинетический коэффициент трения. Опции и значения по умолчанию для этого параметра зависят от модели трения, которую вы выбираете для блока. Опции:
Fixed kinetic friction coefficient — Введите фиксированное значение для кинетического коэффициента трения.
Velocity-dependent kinetic friction coefficient — Задайте кинетический коэффициент трения одномерным поиском по таблице на основе относительной скорости вращения между дисками.
Temperature-dependent friction coefficients — Задайте кинетический коэффициент трения поиском по таблице на основе температуры.
Temperature and velocity-dependent friction coefficients — Задайте кинетический коэффициент трения поиском по таблице на основе температуры и относительной скорости вращения между дисками.
Установка модели трения влияет на видимость других параметров, настроек и портов.
Для получения дополнительной информации смотрите Зависимости от Параметров блоков Синхронизатора.
Relative velocity vector — Относительная скоростьrad/s (значение по умолчанию) | векторВходные значения для относительной скорости как вектор. Значения в векторе должны увеличиться слева направо. Минимальное количество значений зависит от метода интерполяции, который вы выбираете. Для линейной интерполяции введите по крайней мере два значения на размерность. Для сплайн-интерполяции введите по крайней мере три значения на размерность.
Этот параметр отображается только, когда параметр Friction model устанавливается на Velocity-dependent kinetic friction coefficient или Temperature and velocity-dependent friction coefficients.
Для получения дополнительной информации смотрите Зависимости от Параметров блоков Синхронизатора.
Temperature vector — ТемператураK (значение по умолчанию) | увеличивающийся векторВходные значения для температуры как вектор. Минимальное количество значений зависит от метода интерполяции, который вы выбираете. Для линейной интерполяции введите по крайней мере два значения на размерность. Для сплайн-интерполяции введите по крайней мере три значения на размерность. Значения в векторе должны увеличиться слева направо.
Этот параметр отображается только, когда параметр Friction model устанавливается на Temperature-dependent friction coefficients или Temperature and velocity-dependent friction coefficients.
Для получения дополнительной информации смотрите Зависимости от Параметров блоков Синхронизатора.
Static friction coefficient — Статический коэффициент тренияСтатическое или пиковое значение коэффициента трения. Статический коэффициент трения должен быть больше кинетического коэффициента трения.
этот параметр отображается только, когда параметр Friction model устанавливается на Fixed kinetic friction coefficient или Velocity-dependent kinetic friction coefficient.
Для получения дополнительной информации смотрите Зависимости от Параметров блоков Синхронизатора.
Static friction coefficient vector — Статический коэффициент тренияСтатические, или пиковые, значения коэффициента трения как вектор. Вектор должен иметь то же число элементов как температурный вектор. Каждое значение должно быть больше значения соответствующего элемента в кинетическом векторе коэффициентов трения.
Этот параметр отображается только, когда параметр Friction model устанавливается на Temperature-dependent friction coefficients или Temperature and velocity-dependent friction coefficients.
Для получения дополнительной информации смотрите Зависимости от Параметров блоков Синхронизатора.
Kinetic friction coefficient — Кинетический коэффициент тренияКинетический, или кулонов, коэффициент трения. Коэффициент должен быть больше нуля.
Этот параметр отображается только, когда параметр Friction model устанавливается на Fixed kinetic friction coefficient.
Для получения дополнительной информации смотрите Зависимости от Параметров блоков Синхронизатора.
Kinetic friction coefficient vector — Кинетический коэффициент трения[.3, .28, .25] | векторВыходные значения для кинетического коэффициента трения как вектор. Все значения должны быть больше нуля.
Если параметр Friction model устанавливается на
Velocity-dependent kinetic friction coefficient — Вектор должен иметь то же число элементов как относительный вектор скорости.
Temperature-dependent friction coefficients — Вектор должен иметь то же число элементов как температурный вектор.
Этот параметр отображается только, когда параметр Friction model устанавливается на Velocity-dependent kinetic friction coefficient или Temperature-dependent friction coefficients.
Для получения дополнительной информации смотрите Зависимости от Параметров блоков Синхронизатора.
Kinetic friction coefficient matrix — Кинетический коэффициент тренияВыходные значения для кинетического коэффициента трения как матрица. Все значения должны быть больше нуля. Размер матрицы должен равняться размеру матрицы, которая является результатом температурного вектора × кинетический содействующий вектор скорости родственника трения.
Этот параметр отображается только, когда параметр Friction model устанавливается на Temperature and velocity-dependent friction coefficients.
Для получения дополнительной информации смотрите Зависимости от Параметров блоков Синхронизатора.
Friction coefficient interpolation method метод интерполяцииLinear (значение по умолчанию) | SmoothМетод интерполяции для аппроксимации выходного значения, когда входное значение между двумя последовательными узлами решетки:
Linear — Выберите эту опцию, чтобы получить лучшую эффективность.
Smooth — Выберите эту опцию, чтобы произвести непрерывную кривую с непрерывными производными первого порядка.
Для получения дополнительной информации об алгоритмах интерполяции смотрите страницу с описанием блока PS Lookup Table (1D).
Этот параметр отображается только, когда в настройках Cone Clutch параметр Friction model устанавливается на Velocity-dependent kinetic friction coefficient, Temperature-dependent friction coefficients, или Temperature and velocity-dependent friction coefficients.
Для получения дополнительной информации смотрите Зависимости от Параметров блоков Синхронизатора.
Friction coefficient extrapolation method ExtrapolationMethod Linear (значение по умолчанию) | Nearest | ErrorМетод экстраполяции для определения выходного значения, когда входное значение находится вне диапазона, указанного в списке аргументов:
Linear — Выберите эту опцию, чтобы произвести линию, соединяющую соседние значения в области экстраполяции и за пределами с областью интерполяции.
Nearest — Выберите эту опцию, чтобы произвести экстраполяцию, которая не выше самой высокой или ниже самой низкой точки в области данных.
Error — Выберите эту опцию, чтобы не входить в режим экстраполяции, когда это необходимо, ваши данные, чтобы быть в табличной области значений. Если входной сигнал находится вне области значений таблицы, симуляция останавливает и генерирует ошибку.
Для получения дополнительной информации об алгоритмах экстраполяции смотрите страницу с описанием блока PS Lookup Table (1D).
Этот параметр отображается только, когда в настройках Cone Clutch параметр Friction model устанавливается на Velocity-dependent kinetic friction coefficient, Temperature-dependent friction coefficients, или Temperature and velocity-dependent friction coefficients.
Для получения дополнительной информации смотрите Зависимости от Параметров блоков Синхронизатора.
Velocity tolerance — Относительный скоростной порог блокировкиrad/s (значение по умолчанию) | скалярОтносительная скорость, ниже которой две поверхности могут заблокировать. Поверхности блокируют, если крутящий момент меньше продукта эффективного радиуса, статического коэффициента трения и прикладывавшей нормальной силы.
Threshold force — Нормальный порог силы контактаN (значение по умолчанию) | скалярНормальная сила прикладывается, только если сумма силы превышает значение параметра Threshold force. Силы ниже Threshold force не прикладываются, таким образом, нет никакого переданного фрикционного крутящего момента.
Методы, которые доступны для параметризации передачи крутящего момента, зависят, температурно-зависима ли модель трения.
Модель трения определяется, в настройках Cone Clutch, установкой параметра Friction model:
Fixed kinetic friction coefficient — Температурный независимый политик
Velocity-dependent kinetic friction coefficient — Температурный независимый политик
Temperature-dependent friction coefficients — Температурный зависимый
Temperature and velocity-dependent friction coefficients — Температурный зависимый
Для независимой от температуры модели параметрируйте блок с помощью одной из опций для параметра Torque Transmission Model.
Torque transmission model — Закрутите модель передачиFriction clutch approximation — Suitable for HIL and linearization (значение по умолчанию) | Dynamic with backlashВычислительная среда для моделирования динамического поведения муфты собаки:
Friction clutch approximation — Suitable for HIL and linearization — Обязательство муфты модели как явление трения между звонком и концентратором. Эта модель, на основе блока Fundamental Friction Clutch, обеспечивает в вычислительном отношении эффективное приближение муфты собаки.
Dynamic with backlash — Обязательство муфты модели подробно, составляя такие явления как обратная реакция, крутильная податливость и силы контакта между звонком и зубами концентратора.
Этот параметр отображается, только если в настройках Cone Clutch параметр Friction model устанавливается на Fixed kinetic friction coefficient или Velocity-dependent friction coefficients.
Видимость связанных параметров в настройках Dog Clutch и Initial Conditions затронута опцией, которую вы выбираете для этого параметра.
Для получения дополнительной информации смотрите Зависимости от Параметров блоков Синхронизатора.
Temperature vector — ТемператураK (значение по умолчанию) | увеличивающийся векторВходные значения для температуры как вектор. Минимальное количество значений зависит от метода интерполяции, который вы выбираете. Для линейной интерполяции введите по крайней мере два значения на размерность. Для сплайн-интерполяции введите по крайней мере три значения на размерность. Значения в векторе должны увеличиться слева направо.
Этот параметр отображается, только если в настройках Cone Clutch параметр Friction model устанавливается на Temperature-dependent friction coefficients или Temperature and velocity-dependent friction coefficients.
Для получения дополнительной информации смотрите Зависимости от Параметров блоков Синхронизатора.
Maximum transmitted torque — Максимальный переданный крутящий моментN*m (значение по умолчанию) | положительная скалярная величинаСамый большой крутящий момент, который муфта может передать, соответствуя нескользкой занятой настройке. Если крутящий момент, переданный между звонком и концентратором, превышает это значение, эти два компонента начинают уменьшаться друг относительно друга. Этот крутящий момент определяет статический предел трения в приближении муфты сцепления
Этот параметр отображается, только если в настройках Cone Clutch параметр Friction model устанавливается на Fixed kinetic friction coefficient или Velocity-dependent kinetic friction coefficient и в настройках Dog Clutch параметр Torque transmission model устанавливается на Friction clutch approximation - Suitable for HIL and linearization.
Для получения дополнительной информации смотрите Зависимости от Параметров блоков Синхронизатора.
Maximum transmitted torque vector — Максимальный переданный крутящий моментN*m (значение по умолчанию) | векторСамый большой крутящий момент, который муфта может передать, соответствуя нескользкой занятой настройке в виде вектора. Если крутящий момент, переданный между звонком и концентратором, превышает это значение, эти два компонента начинают уменьшаться друг относительно друга. Этот крутящий момент определяет статический предел трения в приближении муфты сцепления. Вектор имеет то же число элементов как температурный вектор.
Этот параметр отображается, только если в настройках Cone Clutch параметр Friction model устанавливается на Temperature-dependent kinetic friction coefficient или Temperature and velocity-dependent kinetic friction coefficient.
Для получения дополнительной информации смотрите Зависимости от Параметров блоков Синхронизатора.
Interpolation method метод интерполяцииLinear (значение по умолчанию) | SmoothМетод интерполяции для аппроксимации выходного значения, когда входное значение между двумя последовательными узлами решетки:
Linear — Выберите эту опцию, чтобы получить лучшую эффективность.
Smooth — Выберите эту опцию, чтобы произвести непрерывную кривую с непрерывными производными первого порядка.
Для получения дополнительной информации об алгоритмах интерполяции смотрите страницу с описанием блока PS Lookup Table (1D).
Этот параметр отображается, только если в настройках Cone Clutch параметр Friction model устанавливается на Temperature-dependent kinetic friction coefficient или Temperature and velocity-dependent kinetic friction coefficient.
Для получения дополнительной информации смотрите Зависимости от Параметров блоков Синхронизатора.
Extrapolation method ExtrapolationMethod Linear (значение по умолчанию) | Nearest | ErrorМетод экстраполяции для определения выходного значения, когда входное значение находится вне диапазона, указанного в списке аргументов:
Linear — Выберите эту опцию, чтобы произвести линию, соединяющую соседние значения в области экстраполяции и за пределами с областью интерполяции.
Nearest — Выберите эту опцию, чтобы произвести экстраполяцию, которая не выше самой высокой или ниже самой низкой точки в области данных.
Error — Выберите эту опцию, чтобы не входить в режим экстраполяции, когда это необходимо, ваши данные, чтобы быть в табличной области значений. Если входной сигнал находится вне области значений таблицы, симуляция останавливает и генерирует ошибку.
Для получения дополнительной информации об алгоритмах экстраполяции смотрите страницу с описанием блока PS Lookup Table (1D).
Этот параметр отображается, только если в настройках Cone Clutch параметр Friction model устанавливается на Temperature-dependent kinetic friction coefficient или Temperature and velocity-dependent kinetic friction coefficient.
Для получения дополнительной информации смотрите Зависимости от Параметров блоков Синхронизатора.
Clutch teeth mean radius — Сожмите зубной средний радиусmm (значение по умолчанию) | положительная скалярная величинаРасстояние от звонка или концентратора сосредотачивается к соответствующему зубному центру. Средний зубной радиус определяет нормальные силы контакта между звонком и зубами концентратора, учитывая крутящий момент передачи между этими двумя компонентами. Значение должно быть больше нуля.
Number of teeth — Количество звонка или зубов концентратораОбщее количество зубов в звонке или концентраторе. Эти два компонента имеют равные зубные числа. Значение должно быть больше или быть равно одному.
Этот параметр отображается, только если в настройках Cone Clutch параметр Friction model устанавливается на Fixed kinetic friction coefficient или Velocity-dependent kinetic friction coefficient и в настройках Dog Clutch параметр Torque transmission model устанавливается на Dynamic with backlash.
Для получения дополнительной информации смотрите Зависимости от Параметров блоков Синхронизатора.
Rotational backlash — Вращательная обратная реакцияdeg (значение по умолчанию) | положительная скалярная величинаДопустимое угловое движение или игра, между звонком и зубами концентратора в занятой настройке муфты. Значение должно быть больше нуля.
Этот параметр отображается, только если в настройках Cone Clutch параметр Friction model устанавливается на Fixed kinetic friction coefficient или Velocity-dependent kinetic friction coefficient и в настройках Dog Clutch параметр Torque transmission model устанавливается на Dynamic with backlash.
Для получения дополнительной информации смотрите Зависимости от Параметров блоков Синхронизатора.
Torsional stiffness — Крутильная жесткость10e6
N*m/rad (значение по умолчанию) | положительная скалярная величинаЛинейный крутильный коэффициент жесткости в контакте взаимодействует через интерфейс между зубами концентратора и звонком. Этот коэффициент характеризует восстанавливающийся компонент силы контакта между этими двумя зубными рядами. Большие значения жесткости соответствуют большим силам контакта. Значение должно быть больше нуля. Значением по умолчанию является 10e6
N*m/rad.
Этот параметр отображается, только если в настройках Cone Clutch параметр Friction model устанавливается на Fixed kinetic friction coefficient или Velocity-dependent kinetic friction coefficient и в настройках Dog Clutch параметр Torque transmission model устанавливается на Dynamic with backlash.
Для получения дополнительной информации смотрите Зависимости от Параметров блоков Синхронизатора.
Torsional damping — Крутильное затуханиеN*m/(rad/s) (значение по умолчанию) | положительная скалярная величинаЛинейный крутильный коэффициент демпфирования в контакте взаимодействует через интерфейс между зубами концентратора и звонком. Этот коэффициент характеризует диссипативный компонент силы контакта между этими двумя зубными рядами. Большие значения затухания соответствуют большему энергетическому рассеянию во время контакта. Значение должно быть больше нуля.
Этот параметр отображается, только если в настройках Cone Clutch параметр Friction model устанавливается на Fixed kinetic friction coefficient или Velocity-dependent kinetic friction coefficient и в настройках Dog Clutch параметр Torque transmission model устанавливается на Dynamic with backlash.
Для получения дополнительной информации смотрите Зависимости от Параметров блоков Синхронизатора.
Tooth-tooth friction coefficient — Контакт зуба-зуба кинетический коэффициент тренияКинетический коэффициент трения в контакте взаимодействует через интерфейс между зубами концентратора и звонком. Этот коэффициент характеризует диссипативную силу, которая сопротивляется движению рычажного устройства сдвига из-за контакта зуба-зуба во время обязательства/разъединения муфты.
Большие содействующие значения соответствуют большему энергетическому рассеянию во время движения рычажного устройства сдвига. Значение должно быть больше нуля.
Этот параметр отображается, только если в настройках Cone Clutch параметр Friction model устанавливается на Fixed kinetic friction coefficient или Velocity-dependent kinetic friction coefficient и в настройках Dog Clutch параметр Torque transmission model устанавливается на Dynamic with backlash.
Для получения дополнительной информации смотрите Зависимости от Параметров блоков Синхронизатора.
Peak force — Пиковая сила сдвигаN (значение по умолчанию) | неотрицательный скалярПиковая сила сдвига стопора.
Notch width — Отметьте ширинуmm (значение по умолчанию) | неотрицательный скалярШирина области, где стопор показывает силу сдвига.
Viscous friction coefficient — Коэффициент вязкого тренияN/(m/s) (значение по умолчанию) | неотрицательный скалярКоэффициент вязкого трения в поверхности контакта стопора. Значение должно быть больше или быть равным нулю.
Friction to peak force ratio — Трение, чтобы достигнуть максимума отношение силыОтношение кинетического трения к пиковой силе сдвига стопора. Параметр используется, чтобы установить значение кинетического трения. Параметр должен быть больше или быть равным нулю.
Friction velocity threshold — Кинетический скоростной порог тренияm/s (значение по умолчанию)Скорость требуется для пикового кинетического трения в поверхности контакта стопора. Параметр гарантирует, что сила непрерывна, когда направление перемещения изменяется, увеличивая числовую устойчивость симуляции. Параметр должен быть больше нуля. Значением по умолчанию является 0.05
m/s.
Shift linkage travel direction — Направление перемещения условия обязательстваPositive shift linkage displacement engages clutch (значение по умолчанию) | Negative shift linkage displacement engages clutchНаправление рычажное устройство сдвига должно переместиться в затронуть муфту. Выбор включает положительные и отрицательные смещения.
Maximum engagement speed — Скорость обязательства верхний скоростной порогinf (значение по умолчанию) | положительная скалярная величинаОтносительная скорость вращения между звонком и концентратором, выше которого не может участвовать муфта. Значение характерно для определенной коробки передач или передачи. Минимизация значения помогает избежать высокого динамического удара во время зацепления. Значение должно быть больше нуля.
Tooth overlap to engage — Зубной порог обязательства перекрытияmm (значение по умолчанию) | положительная скалярная величинаПерекройте длину между звонком и сконцентрируйте зубы вдоль общей продольной оси, выше которой может участвовать муфта. Муфта остается разъединенной до зубного перекрытия, по крайней мере, этой длиной. Значение должно быть больше нуля.
Tooth height — Зубная высотаmm (значение по умолчанию) | положительная скалярная величинаРасстояние между основой и гребнем зуба. Звонок и зубы концентратора совместно используют ту же высоту. Зубная высота и разрешение кольцевого концентратора, когда полностью расцеплено определяют максимальный промежуток перемещения рычажного устройства сдвига. Значение должно быть больше нуля.
Ring-hub clearance when disengaged — Разрешение кольцевого концентратора, когда расцепленоmm (значение по умолчанию) | положительная скалярная величинаМаксимум открывает разрыв между звонком и зубными гребнями концентратора вдоль оси перевода рычажного устройства сдвига. Этот разрыв соответствует полностью разъединенному состоянию муфты. Зубная высота и разрешение кольцевого концентратора, когда полностью расцеплено определяют максимальный промежуток перемещения рычажного устройства сдвига. Значение должно быть больше нуля.
Hard stop at back of shift linkage — Модель жесткого упораOn (значение по умолчанию) | OffЖесткий упор, который препятствует тому, чтобы рычажное устройство сдвига переместилось вне полностью разъединенного положения:
On — Жесткий упор, когда полностью расцеплено.
Off — Никакой жесткий упор, когда полностью расцеплено.
Dog clutch ring stop stiffness — Муфта собаки звонит жесткость остановки10e5
N/m (значение по умолчанию) | положительная скалярная величинаЖесткость жестких упоров с обеих сторон собаки сжимает звонок. Модель принимает звонок, и остановки ведут себя эластично. Свяжитесь деформация пропорциональна приложенной силе и обратной величине упругости контакта. Значение жесткости должно быть присвоено со ссылкой на параметр Tooth overlap to engage. Слишком низкая жесткость могла заставить деформацию превышать необходимое перекрытие и инициировать ложное обязательство. Параметр должен быть больше нуля.
Cone clutch ring stop stiffness — Конический звонок муфты останавливает жесткость10e5
N/m (значение по умолчанию) | положительная скалярная величинаЖесткость жестких упоров с обеих сторон конического звонка муфты. Модель принимает звонок, и остановки ведут себя эластично. Свяжитесь деформация пропорциональна приложенной силе и обратной величине упругости контакта.
Dog clutch ring stop damping — Звонок муфты собаки прекращает ослаблять1e3
N/(m/s) (значение по умолчанию) | неотрицательный скалярПоступательное затухание контакта между собакой сжимает звонок и концентратор. Значение затухания обратно пропорционально количеству колебаний, которые происходят после удара. Параметр должен быть больше нуля.
Cone clutch ring stop damping — Конический звонок муфты прекращает ослаблять1e3
N/(m/s) (значение по умолчанию) | неотрицательный скалярПоступательное затухание контакта между конической муфтой звонит и концентратор. Значение затухания обратно пропорционально количеству колебаний, которые происходят после удара. Параметр должен быть больше нуля.
Shift linkage viscous friction coefficient — Переключите коэффициент вязкого трения рычажного устройстваN/(m/s) (значение по умолчанию) | положительная скалярная величинаКоэффициент вязкого трения для относительного поступательного движения между концентратором и звонком. Значение параметра зависит от состояния смазки и качества контакта с поверхностями. Коэффициент должен быть больше или быть равным нулю.
Initial state — Начальное состояние муфтыAll clutches unlocked (значение по умолчанию) | Cone clutch locked | All clutches lockedНачало настройки конуса и предохранительных муфт:
All clutches unlocked — Конус и предохранительные муфты передают нулевой крутящий момент между валами концентратора и звонком.
Cone clutch locked — Коническая муфта передает крутящий момент между валами концентратора и звонком.
All clutches locked — Конус и предохранительные муфты передают крутящий момент между валами концентратора и звонком.
Dog clutch initial shift linkage position — Начальная буква муфты собаки переключает положение рычажного устройстваmm (значение по умолчанию) | скалярИсходное положение секции связей сдвига, которая присоединяет к муфте собаки. Значение параметра имеет эти ограничения:
| Направление перемещения рычажного устройства | Состояние муфты собаки | Ограничение параметра |
|---|---|---|
Positive shift linkage displacement engages clutch | Первоначально занятый | Параметр должен быть больше суммы параметров Ring-hub clearance when dog clutch disengaged и Tooth overlap to engage |
| Первоначально расцепленный | Параметр должен быть меньшим, чем сумма параметров Ring-hub clearance when dog clutch disengaged и Tooth overlap to engage | |
Negative shift linkage displacement engages clutch | Первоначально занятый | Отрицательный из параметра должен быть больше суммы параметров Ring-hub clearance when dog clutch disengaged и Tooth overlap to engage |
| Первоначально расцепленный | Отрицательный из параметра должно быть меньшим, чем сумма параметров Ring-hub clearance when dog clutch disengaged и Tooth overlap to engage |
Cone clutch initial shift linkage position — Коническая начальная буква муфты переключает положение рычажного устройстваmm (значение по умолчанию) | скалярИсходное положение секции связей сдвига, которая присоединяет к конической муфте. Значение параметра имеет эти ограничения:
| Направление перемещения рычажного устройства | Состояние муфты собаки | Ограничение параметра |
|---|---|---|
Positive shift linkage displacement engages clutch | Первоначально занятый | Параметр должен быть больше значения Ring-hub clearance when cone clutch disengaged |
| Первоначально расцепленный | Параметр должен быть меньшим, чем значение Ring-hub clearance when cone clutch disengaged | |
Negative shift linkage displacement engages clutch | Первоначально занятый | Отрицательный из параметра должен быть больше значения Ring-hub clearance when dog cone disengaged |
| Первоначально расцепленный | Отрицательный из параметра должно быть меньшим, чем значение Ring-hub clearance when dog cone disengaged |
Initial dog clutch ring-hub offset angle — Начальный кольцевой концентратор муфты собаки возместил уголdeg (значение по умолчанию) | скалярУгол поворота между звонком и концентратором в нуле времени симуляции. Этот угол определяет, могут ли звонок и зубы концентратора взаимно блокироваться, и следовательно может ли муфта участвовать. Начальный угол смещения должен удовлетворить этим условиям:
Если начальное состояние муфты расцеплено, начальный угол смещения должен упасть в области значений
где N является количеством зубов, существующих в звонке или концентраторе. Эти два компонента содержат то же количество зубов.
Если начальное состояние муфты занято, начальный угол смещения должен упасть в области значений
где δ является углом обратной реакции между зубами концентратора и звонком.
Этот параметр отображается, только если оба из этих условий соблюдают:
В настройках Cone Clutch параметр Friction model устанавливается на Fixed kinetic friction coefficient или Velocity-dependent kinetic friction coefficient.
В настройках Dog Clutch Torque transmission model установлен в Dynamic with backlash.
Настройки Thermal Port отображаются только, когда в настройках Cone Clutch параметр Friction model устанавливается на Temperature-dependent friction coefficients или Temperature and velocity-dependent friction coefficients. Для получения дополнительной информации смотрите Зависимости от Параметров блоков Синхронизатора.
Thermal mass — Количество теплаkJ/K (значение по умолчанию) | скалярТепловая энергия, требуемая изменить температуру компонента одной степенью. Чем больше количество тепла, тем более стойкий компонент к изменению температуры.
Этот параметр отображается, только если в настройках Cone Clutch параметр Friction model устанавливается на Temperature-dependent friction coefficients или Temperature and velocity-dependent friction coefficients. Для получения дополнительной информации смотрите Зависимости от Параметров блоков Синхронизатора.
Initial temperature — Начальная температураK (значение по умолчанию) | скалярТемпература компонента в начале симуляции. Начальная температура изменяет КПД компонента согласно вектору КПД, который вы задаете, влияя на запутывающий запуск или потери на трение.
Этот параметр отображается, только если в настройках Cone Clutch параметр Friction model устанавливается на Temperature-dependent friction coefficients или Temperature and velocity-dependent friction coefficients. Для получения дополнительной информации смотрите Зависимости от Параметров блоков Синхронизатора.
Чтобы оптимизировать вашу модель для линеаризации, используйте Dog Clutch> настройка по умолчанию параметра Torque transmission model, Friction clutch approximation - Suitable for HIL and linearization.
Для оптимальной эффективности симуляции используйте Dog Clutch> настройка по умолчанию параметра Torque transmission model, Friction clutch approximation - Suitable for HIL and linearization.
Cone Clutch | Dog Clutch | Double-Sided Synchronizer | Translational Detent
1. Если смысл перевода понятен, то лучше оставьте как есть и не придирайтесь к словам, синонимам и тому подобному. О вкусах не спорим.
2. Не дополняйте перевод комментариями “от себя”. В исправлении не должно появляться дополнительных смыслов и комментариев, отсутствующих в оригинале. Такие правки не получится интегрировать в алгоритме автоматического перевода.
3. Сохраняйте структуру оригинального текста - например, не разбивайте одно предложение на два.
4. Не имеет смысла однотипное исправление перевода какого-то термина во всех предложениях. Исправляйте только в одном месте. Когда Вашу правку одобрят, это исправление будет алгоритмически распространено и на другие части документации.
5. По иным вопросам, например если надо исправить заблокированное для перевода слово, обратитесь к редакторам через форму технической поддержки.
