В этом примере показано, как обнаружить и ответить на отказ в ходовой части с помощью блока Rotational Damper. Блок Rotational Damper позволяет вам задавать коэффициент демпфирования в зависимости от временных или поведенческих триггеров. Можно программировать коэффициент демпфирования, чтобы измениться в определенное время в симуляции или когда количество шоков для данного ускорения превышает предел поведению отказа модели. Моделирование отказа позволяет вам предсказывать, как ваша фактическая физическая система отвечает, когда это испытывает действительные отказы. Это также позволяет вам тестировать робастность и скорость отклика вашей системы управления.
В примере отказ обнаруживается демпфером, который присоединен к гибкому валу. Несмотря на то, что можно выполнить большинство шагов в этом примере с помощью инструментов что Simulink® и пользовательские интерфейсы Simscape™ Driveline™ обеспечивают, скрипты предоставляются. Можно объединить скрипты в больший скрипт для разверток параметра.
Откройте модель. В MATLAB® командная строка, введите:
model = 'sdl_flexible_shaft';
open_system(model)
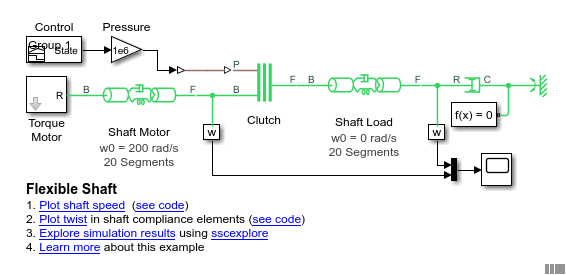
Эта модель содержит смоделированное использование двух гибких алюминиевых валов подхода сосредоточенного параметра. Электроприводы вал двигателя. Вязкий демпфер соединяется с валом загрузки. Вязкий демпфер представлен блоком Rotational Damper из библиотеки Simscape> Foundation Library> Mechanical> Rotational Elements. Блок Foundation Library Rotational Damper не может обнаружить или ответить на отказы.
Симулируйте модель и постройте результаты.
![]() Скрипт для генерации и графического вывода результатов симуляции
Скрипт для генерации и графического вывода результатов симуляции

В начале симуляции разблокирована муфта, и управляемый вал свободен. Начальная скорость вала двигателя составляет заданные 200 рад/с, и система запускается в устойчивом состоянии. Колебания, инициированные привлечением и расцеплением муфты, происходят из-за гибкости в валах.
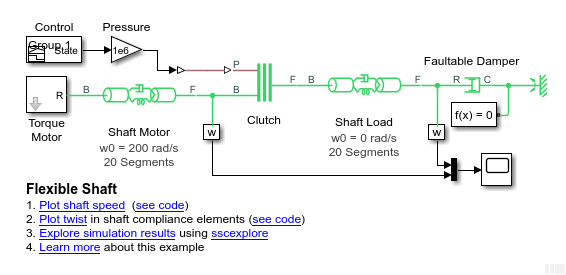
Замените демпфер Simscape на Simscape Driveline Rotational Damper, который находится в библиотеке Simscape> Driveline> Couplings & Drives> Springs & Dampers. Пометьте новый блок Faultable Damper.
![]() Скрипт для замены блока Rotational Damper
Скрипт для замены блока Rotational Damper
Включите основанный на времени отказ и задайте ответ, который включает изменение в коэффициент демпфирования и генерацию предупреждения MATLAB. Используйте эти значения для демпфера параметры Fault:
Enable faults — Enabled
Faulted damping coefficient — 10
Enable temporal fault trigger — Enabled
Simulation time for fault event — 0.06
Reporting when fault occurs — Warning
![]() Скрипт для конфигурирования блока Rotational Damper Используя синхронизированный отказ
Скрипт для конфигурирования блока Rotational Damper Используя синхронизированный отказ
Симулируйте модель и постройте результаты.
![]() Скрипт для генерации и графического вывода результатов симуляции
Скрипт для генерации и графического вывода результатов симуляции
Warning: At time 0.060000, one or more assertions are triggered. A fault event has occurred The assertion comes from: Block path: sdl_flexible_shaft/Faultable Damper Assert location: (location information is protected)
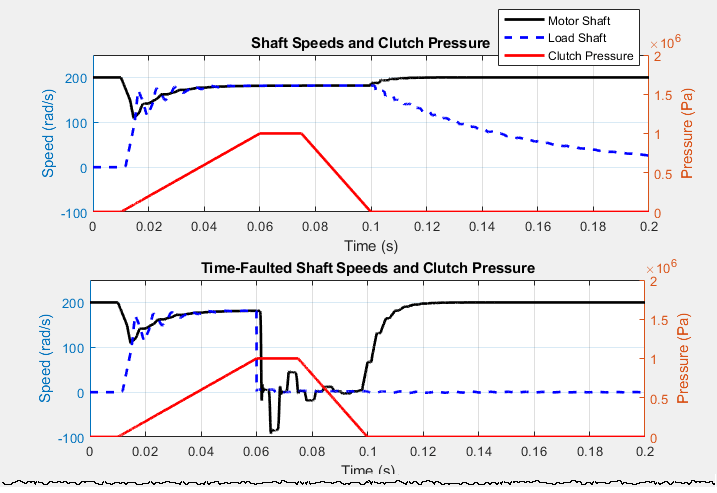
Во времени симуляции t = 0,06 с, время, заданное для отказа, сообщают о предупреждении. Коэффициент демпфирования пропускает и замедляет скорость обоих валов.
Включите основанный на шоке отказ и задайте ответ, который включает изменение в коэффициент демпфирования и генерацию предупреждения MATLAB. Затем симулируйте модель и постройте новые результаты. Используйте эти значения для демпфера параметры Fault:
Enable faults — Yes
Faulted damping coefficient — 150
Enable temporal fault trigger — Disabled
Enable behavioral fault trigger — Enabled
Maximum permissible acceleration — 50
Maximum number of shocks — 2
Reporting when fault occurs — Warning
![]() Скрипт для конфигурирования блока Rotational Damper Используя синхронизированный отказ
Скрипт для конфигурирования блока Rotational Damper Используя синхронизированный отказ
Симулируйте модель и постройте результаты.
![]() Скрипт для генерации и графического вывода результатов симуляции
Скрипт для генерации и графического вывода результатов симуляции
Warning: At time 0.026048, one or more assertions are triggered. A fault event has occurred The assertion comes from: Block path: sdl_flexible_shaft/Faultable Damper Assert location: (location information is protected)
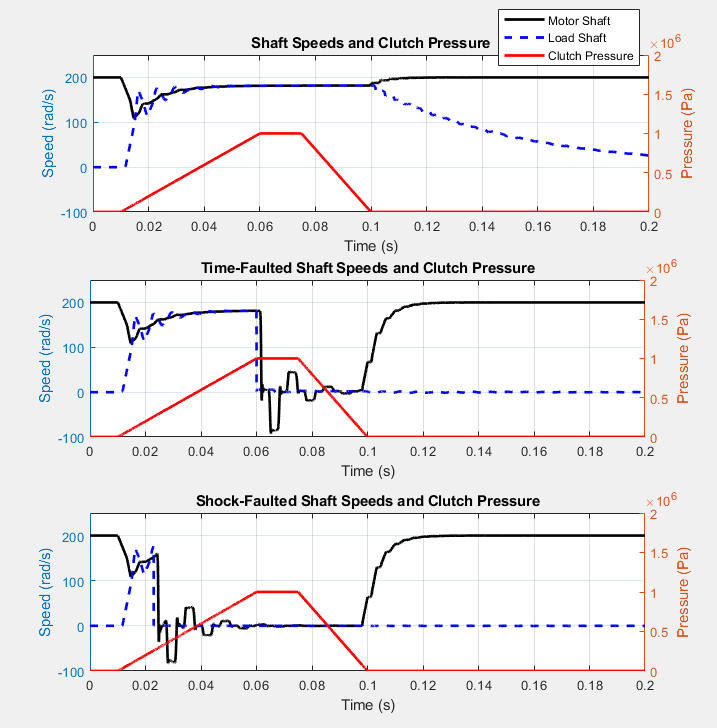
Во времени симуляции t = 0,026 с, достигнуто максимальное количество шоков для заданного ускорения. О предупреждении сообщают, и коэффициент демпфирования увеличивает и замедляет скорость обоих валов.
