Программное обеспечение Simscape™ является набором библиотек блоков и специальных функций симуляции моделирования физических систем в Simulink® среда. Это использует подход Физической сети, который отличается от стандартного подхода моделирования Simulink и особенно подходит для симуляции систем, которые состоят из действительных физических компонентов.
Блоки Simulink представляют основные математические операции. Когда вы соединяете блоки Simulink вместе, получившаяся схема эквивалентна математической модели или представлению, системы в соответствии с проектом. Технология Simscape позволяет вам создать сетевое представление системы в соответствии с проектом, на основе подхода Физической сети. Согласно этому подходу, каждая система представлена как состоящий из функциональных элементов, которые взаимодействуют друг с другом путем обмена энергией через их порты.
Эти порты подключения являются ненаправленными. Они подражают физическим соединениям между элементами. Соединение блоков Simscape вместе походит на соединяющиеся действительные компоненты, такие как насосы, клапаны, и так далее. Другими словами, схемы Simscape подражают размещению физической системы. Если физические компоненты могут быть соединены, их модели могут быть соединены, также. Вы не должны задавать направления потока и информационный поток при соединении блоков Simscape, так же, как вы не должны указывать эту информацию, когда вы соединяете действительные физические компоненты. Подход Физической сети, с его переменными Through и Across и ненаправленными физическими соединениями, автоматически решает все традиционные вопросы с переменными, направленностью, и так далее.
Количество портов подключения для каждого элемента определяется количеством энергетических потоков, которыми это обменивается с другими элементами в системе и зависит на уровне идеализации. Например, фиксированное смещение гидравлический насос в его самой простой форме может быть представлено как элемент 2D порта с одним энергетическим потоком, сопоставленным с входом (всасывание) и другой с выходом. В этом представлении скорость вращения ведущего вала принята постоянная, позволив пропустить энергетический обмен между насосом и валом. С учетом переменного ведущего крутящего момента вам нужен третий порт, сопоставленный с ведущим валом.
Энергетический поток характеризуется его переменными. Каждый энергетический поток сопоставлен с двумя переменными, одной Через и один Через (см. Типы переменных для получения дополнительной информации). Обычно, это переменные, продуктом которых является энергетический поток в ваттах. Они называются основными, или сопряженными, переменными. Например, основные переменные для механических поступательных систем являются силой и скоростью, для систем вращательного механического устройства — крутящего момента и скорости вращения, для гидравлических систем — скорости потока жидкости и давления, для электрических систем — ток и напряжение.
Следующий пример иллюстрирует представление Физической сети гидравлического цилиндра двойного действия.
Элемент представлен тремя энергетическими потоками: два потока энергии жидкости через вход и выход цилиндра и поток механической энергии сопоставлены с движением стержня. Это поэтому имеет следующие три порта коннектора:
A — Гидравлический порт сопоставил с давлением p1 (переменная Across) и скорость потока жидкости q1 (переменная Through)
B Гидравлический порт сопоставил с давлением p2 (переменная Across) и скорость потока жидкости q2 (переменная Through)
R Порт механической передачи сопоставил со скоростью стержня v3 (переменная Across) и сила F3 (переменная Through)
Смотрите Порты Коннектора и Линии Связи для получения дополнительной информации о типах порта коннектора.
Подход Физической сети поддерживает два типа переменных:
Through — Переменные, которые измеряются с прибором, соединенным последовательно с элементом.
Across — Переменные, которые измеряются с прибором, соединенным параллельно с элементом.
В следующей таблице перечислены переменные Through и Across, сопоставленные с каждым типом физической области в программном обеспечении Simscape:
| Физическая область | Через переменную | Через переменную |
|---|---|---|
| Электрический | Напряжение | Текущий |
| Газ | Абсолютное давление и температура | Массовый расход жидкости и энергетическая скорость потока жидкости |
| Гидравлический | Абсолютное давление | Объемный расход |
| Изотермическая жидкость | Абсолютное давление | Массовый расход жидкости |
| Магнитный | Магнитодвижущая сила (mmf) | Поток |
| Вращательное механическое устройство | Скорость вращения | Крутящий момент |
| Поступательное механическое устройство | Поступательная скорость | Сила |
| Сырой воздух | Абсолютное давление, температура, удельная влажность (часть массы водяного пара) и часть массы газа трассировки | Массовый расход жидкости смеси, энергетическая скорость потока жидкости смеси, массовый расход жидкости водяного пара и массовый расход жидкости газа трассировки |
| Тепловой | Температура | Тепловой поток |
| Тепловая жидкость | Абсолютное давление и температура | Массовый расход жидкости и энергетическая скорость потока жидкости |
| Двухфазная жидкость | Абсолютное давление и определенная внутренняя энергия | Массовый расход жидкости и энергетическая скорость потока жидкости |
Переменные Through и Across, сопоставленные со всеми энергетическими потоками, формируют основание математической модели блока.
Например, модель гидравлического цилиндра двойного действия, показанного на предыдущем рисунке, может быть описана с простой системой уравнений:
где
| q1,q2 | Скорости потока жидкости через порты А и B, соответственно (Через переменные) |
| p1,p2 | Абсолютные давления в портах А и B, соответственно (Через переменные) |
| A1,A2 | Поршневые эффективные площади |
| F3 | Сила стержня (Через переменную) |
| v3 | Скорость стержня (Через переменную) |
Модель могла быть значительно более комплексной, например, она могла составлять трение, сжимаемость жидкости, инерцию подвижных частей, и так далее. Для всех этих различных математических моделей, однако, настройка элемента (то есть, номер и тип портов и связанных переменных Through и Across) осталась бы то же самое, означая, что подход Физической сети позволяет вам заменить моделями разных уровней сложности, не вводя изменений в схематическом. Например, можно начать разрабатывать систему при помощи блока Resistive Tube из библиотеки Foundation, которая считает только для потерь на трение. На более позднем этапе в разработке можно хотеть с учетом сжимаемости жидкости. Можно затем заменить его на Блок Гидравлический трубопровод, доступный с библиотеками блоков Simscape Fluids™, или, в зависимости от приложения, даже с блоком Segmented Pipeline, если вам также нужно с учетом инерции жидкости. Этот принцип моделирования называется инкрементным моделированием.
Каждая переменная характеризуется ее величиной и знаком. Знак является результатом ориентации измерения. Та же переменная может быть положительной или отрицательной, в зависимости от полярности прибора измерения.
Элементы только с двумя портами характеризуются с одной парой переменных, переменной Through и переменной Across. Поскольку эти переменные тесно связаны, их ориентация задана с одним направлением. Например, если элемент ориентирован на порте A относительно порта B, он подразумевает, что переменная Through (TV) положительна, если он “течет” от А к B, и переменная Across определяется как AV = AVA – AVB, где AVA и AVB являются потенциалами узла элемента или, другими словами, значения этой переменной Across в портах А и B, соответственно.
Этот подход к направлению переменных обладает следующими преимуществами:
Обеспечивает простой и сопоставимый способ определить, активен ли элемент или пассивен. Энергия является одной из самых важных характеристик, которые будут определены в процессе моделирования. Если направление переменных или знак, определяется аналогичное описанному выше, их продукт (то есть, энергия) положителен, если элемент расходует энергию и отрицателен, если это предоставляет энергию системе. Это правило сопровождается в программном обеспечении Simscape.
Упрощает описание модели. Символ A → B достаточно должен задать переменную полярность и для Через и для переменные Through.
Позволяет вам применить ориентированную теорию графов к сетевому анализу и проектированию.
Как пример направления переменных, давайте рассмотрим Идеальный Исходный блок Силы. В этом блоке, как во многих других механических блоках, порт C сопоставлен с исходной контрольной точкой (случай), и порт R сопоставлен со стержнем.
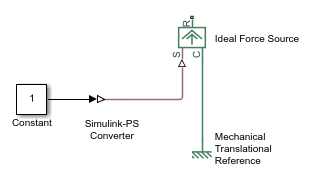
Положительное направление блока от порта C до порта R. Это означает, что сила положительна, если она действует в направлении от C до R и заставляет тела, соединенные с портом R ускоряться в положительном направлении. Относительная скорость определяется как v = vC – vR, где vR, vC абсолютные скорости в портах R и C, соответственно, и это отрицательно, если скорость в порте R больше в порте C. Энергия, произведенная источником, вычисляется как продукт силы и скорости, и отрицательна, если источник предоставляет энергию системе.
Определение положительного направления отличается для различных блоков. Проверяйте источник блока или страницу с описанием блока если в сомнении относительно ориентации блока и направления переменных.
Все элементы в сети разделены на активные и пассивные элементы, в зависимости от того, предоставляют ли они энергию системе или рассеивают (или хранилище) его. Активные элементы (сила и скоростные источники, скорость потока жидкости и источники давления, и т.д.) должны быть ориентированы строго в соответствии с линией действия или функции, которую они, как ожидают, выполнят в системе, в то время как пассивные элементы (демпферы, резисторы, пружины, трубопроводы, и т.д.) могут быть ориентированы так или иначе.
Блоки Simscape могут иметь следующие типы портов:
Физические порты сохранения — порты Nondirectional (например, гидравлический или механический), которые представляют физические соединения и связывают физические переменные на основе подхода Физической сети.
Порты физического сигнала — порты Unidirectional, передающие сигналы, которые используют внутренний механизм Simscape для расчетов.
Каждый из этих портов и связей между ними описан более подробно ниже.
Блоки Simscape имеют специальные порты сохранения![]() . Вы соединяете порты сохранения с линиями физического соединения, отличными от нормальных линий Simulink. Линии физического соединения не имеют никакой свойственной направленности и представляют обмен энергетическими потоками, согласно подходу Физической сети.
. Вы соединяете порты сохранения с линиями физического соединения, отличными от нормальных линий Simulink. Линии физического соединения не имеют никакой свойственной направленности и представляют обмен энергетическими потоками, согласно подходу Физической сети.
Можно соединить порты сохранения только с другими портами сохранения того же типа.
Линии физического соединения, которые соединяют порты сохранения вместе, являются ненаправленными линиями, которые несут физические переменные (Across и переменные Through, аналогичные описанному выше), а не сигналы. Вы не можете соединить физические линии с портами Simulink или с портами физического сигнала.
Два непосредственно соединенных порта сохранения должны иметь те же значения для всех своих переменных Across (таких как давление или скорость вращения).
Можно перейти линии физического соединения. Когда вы делаете так, компоненты, непосредственно соединенные друг с другом, продолжают совместно использовать те же переменные Across. Любая переменная Through (такая как скорость потока жидкости или крутящий момент) переданный вдоль линии физического соединения разделена между несколькими компонентами, соединенными ветвями. То, как переменная Through разделена, определяется системной динамикой.
Для каждой переменной Through сумма всех ее значений, текущих в точку разветвления, равняется сумме всех своих вытекающих значений.
Каждый тип физических портов сохранения, используемых в блоках Simscape исключительно, представляет физическую область моделирования. Для списка типов порта, наряду с переменными Through и Across, сопоставленными с каждым типом, см. таблицу в Типах переменных.
Для улучшенной удобочитаемости блок-схем каждая область Simscape использует отличный цвет по умолчанию и стиль линии для линий связи. Для получения дополнительной информации смотрите Проблемно-ориентированные Стили линии.
Порты физического сигнала![]() несут сигналы между блоками Simscape. Вы соединяете их с регулярными линиями связи, похожими на связи Сигнала Simulink. Порты физического сигнала используются в блок-схемах Simscape вместо портов ввода и вывода Simulink, чтобы увеличить скорость расчета и избежать проблем с алгебраическими циклами. Физическим сигналам можно было сопоставить модули с ними. Вы задаете модули наряду со значениями параметров в диалоговых окнах блока, и программное обеспечение Simscape выполняет необходимые модульные операции преобразования при решении физической сети.
несут сигналы между блоками Simscape. Вы соединяете их с регулярными линиями связи, похожими на связи Сигнала Simulink. Порты физического сигнала используются в блок-схемах Simscape вместо портов ввода и вывода Simulink, чтобы увеличить скорость расчета и избежать проблем с алгебраическими циклами. Физическим сигналам можно было сопоставить модули с ними. Вы задаете модули наряду со значениями параметров в диалоговых окнах блока, и программное обеспечение Simscape выполняет необходимые модульные операции преобразования при решении физической сети.
Библиотека Simscape Foundation содержит, среди других подбиблиотек, библиотеки блоков Физических сигналов. Эти блоки выполняют математические операции и другие функции на физических сигналах, и позволяют вам графически реализовывать уравнения в физической сети.
Линии физического сигнала также имеют отличный стиль и раскрашивают блок-схемы, похожие на линии физического соединения. Для получения дополнительной информации смотрите Проблемно-ориентированные Стили линии.
