По умолчанию блок Solid обеспечивает только порт системы координат, пометил R. В простых формах, таких как Brick Solid, Spherical Solid и Cylindrical Solid, источник системы координат совпадает с солидным центром массы. То же самое обычно не верно для более сложного Extruded Solid и форм Revolved Solid, ни является им импортированных твердых форм.
Система координат тела
Во многих приложениях система координат тела является несоответствующей для соединения соединений и ограничений или для того, чтобы прикладывать силы и крутящие моменты. В таких случаях можно создать новые системы координат, внешние с блоком Solid с помощью блока Твердого Преобразования. Этот блок позволяет вам задать новую систему координат путем определения перевода, и вращение преобразовывает численно.
Альтернативный подход и тот, который часто более интуитивен, должны создать новые системы координат непосредственно в диалоговом окне блока Solid с помощью интерфейса создания системы координат. Этот интерфейс позволяет вам задать новые системы координат в интерактивном режиме путем выравнивания системы координат и осей с геометрическими функциями, такими как плоскости, линии и точки.
Ссылочные и пользовательские системы координат тела
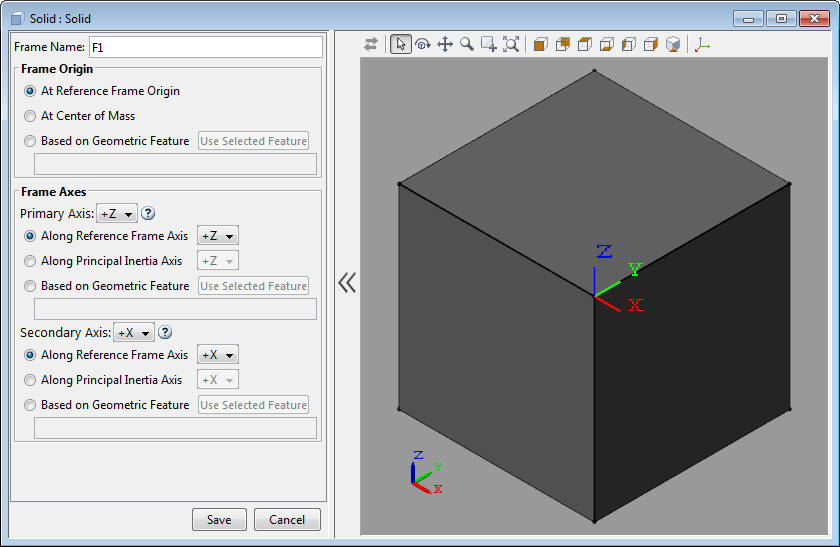
Интерфейс создания системы координат доступен через диалоговое окно блока Solid. Чтобы открыть интерфейс, в Frames расширяемая область, нажимают кнопку Create![]() . Если вы изменяете какие-либо из параметров блоков, необходимо сначала обновить серьезную визуализацию путем нажатия кнопки Update Visualization
. Если вы изменяете какие-либо из параметров блоков, необходимо сначала обновить серьезную визуализацию путем нажатия кнопки Update Visualization![]() .
.
Можно задать системы координат на основе геометрических функций тела или выбора двух систем координат — ссылочные и основные системы координат инерции. Система координат является системой координат по умолчанию тела. Основная система координат инерции является той, источник которой совпадает с центром массы и чьи оси совпадают с основными осями тела.
Системы координат, которые вы задаете геометрическими функциями, характерны для форм, которым принадлежат функции. Если вы делаете систему координат совпадающей с вершиной кирпича, новая система координат допустима только для той конкретной кирпичной формы. Если вы изменяете формы, необходимо отредактировать или удалить новую систему координат, как геометрические функции она зависит от, больше не существуют.
Интерфейс создания системы координат имеет три раздела для определения следующего:
Система координат
Первичная ось
Вторичная ось
Первичная ось ограничивает возможные направления остающихся двух осей. Эти оси должны лечь в нормальной плоскости первичной оси. Если ось или геометрическая функция, использованная, чтобы задать вторичную ось, не лежат на этой плоскости, вторичная ось является проекцией той оси или функции на нормальную плоскость.
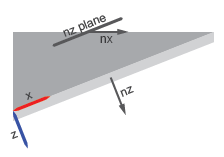
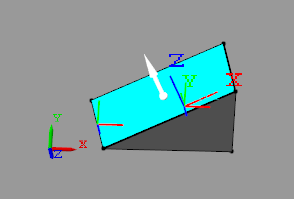
Рисунок показывает вид сверху трехсторонней экструзии, которую вы моделируете в этом примере. Вы выравниваете первичную ось (z) с поверхностным nz вектора нормали и вторичной осью (x) с вектором линии nx. Поскольку nx не нормален к первичной оси, вторичная ось является проекцией nx на нормальную плоскость первичной оси.
Создайте систему координат на теле с помощью интерфейса создания системы координат. Твердая форма является общей экструзией с тремя неравными сторонами. Эта форма помогает продемонстрировать различие между первичными и вторичными осями системы координат, которые вы задаете в интерфейсе создания системы координат.
От библиотеки Body Elements добавьте один блок Extruded Solid в новую модель. Блок Extruded Solid обеспечивает свою собственную утилиту визуализации. Вы не должны обновлять блок-схему, чтобы визуализировать твердую форму или ее системы координат.
В диалоговом окне блока Extruded Solid задайте эти параметры.
| Параметр | Значение |
|---|---|
| Geometry> Cross-section | [0,0;1,0;1,0.5] |
В панели инструментов визуализации нажмите кнопку Update Visualization![]() . Панель визуализации обновляется с трехсторонней экструзией, которую вы задали.
. Панель визуализации обновляется с трехсторонней экструзией, которую вы задали.
Нажмите кнопку Toggle visibility of frames. Панель визуализации показывает все системы координат в теле. На данном этапе тело имеет одну систему координат — ее система координат. Источник системы координат совпадает с [0,0] координата поперечного сечения в midplane экструзии.
В Frames расширяемая область диалогового окна блока Extruded Solid нажмите кнопку Create![]() . Блок Solid открывает интерфейс создания системы координат.
. Блок Solid открывает интерфейс создания системы координат.
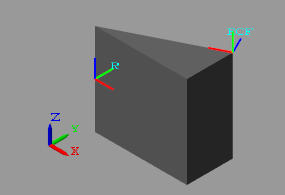
В параметре Frame Name введите ECF (являющийся сокращением от Угловой Системы координат Экструзии). Имя системы координат идентифицирует новую систему координат в панели визуализации блока Solid. Это также появляется как метка порта системы координат на блоке Solid.
Под Frame Origin выберите At Center of Mass. Панель визуализации обновляется с новой системой координат в центре массы тела. Эта система координат имеет ориентацию системы координат по умолчанию, ту из системы координат. Метка ECF идентифицирует новую систему координат.
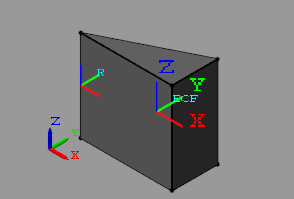
Экспериментируйте с другими местоположениями системы координат. Задайте местоположение источника с помощью одной из вершин экструзии.
Под Frame Origin выберите Based on Geometric Feature. Эта опция позволяет вам выбрать точку или центр плоскости или линии как система координат.
В панели визуализации выберите показанную на рисунке вершину. Вершина находится в главной плоскости экструзии. Гарантируйте, что точка наблюдения установлена в Isometric. В области Frame Origin гарантируйте, что вершину называют Location of top point 3.
Под Frame Origin нажмите кнопку Use Selected Feature. Панель визуализации обновляется с системой координат в выбранном углу.
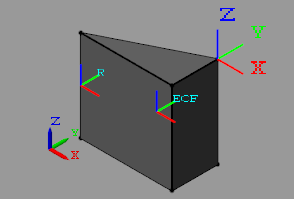
Первичная ось ограничивает остающиеся две оси лежать на ее нормальной плоскости. В этом смысле первичная ось играет доминирующую роль в установке ориентации системы координат. Сделайте первичную ось нормальной на поверхность, которая содержит гипотенузу поперечного сечения:
В области Frame Axes под Primary Axis выберите Based on Geometric Feature. Направление, которое вы задаете на следующих шагах, является направлением первичной оси по умолчанию, +Z.
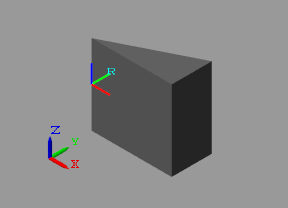
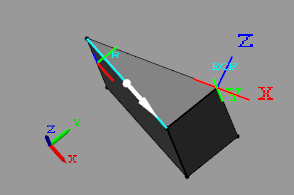
В панели визуализации вращайте тело и выберите показанную поверхность. Панель визуализации подсвечивает поверхность и показывает ее вектор нормали. В области Frame Axes под Primary Axis гарантируйте, что поверхность называют Surface normal of side surface 3.
В области Frame Axes под Primary Axis нажмите кнопку Use Selected Feature. Панель визуализации обновляется с осью z системы координат ECF, отображенной темно-синим, параллельным вектору нормали выбранной поверхности.
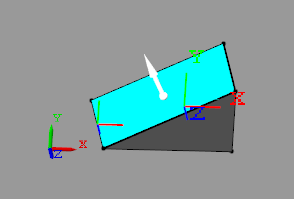
Вторичная ось завершает определение новой системы координат. В сочетании с первичной осью вторичная ось полностью ограничивает направление третьей оси. Вторичная ось самостоятельно ограничивается лечь на нормальную плоскость первичной оси. Чтобы видеть эффекты этого ограничения, задайте вторичную ось на основе линии, не нормальной к первичной оси:
В области Frame Axes, установленной параметр Secondary Axis на -X. Направление, которое вы задаете в следующих шагах, является направлением -X ось.
В области Frame Axes, под Secondary Axis, выбирают Based on Geometric Feature.
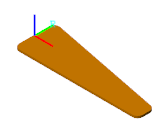
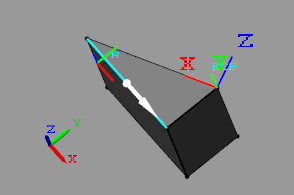
В панели визуализации вращайте тело и выберите показанную линию. В области Frame Axes, под Secondary Axis, гарантируют, что эту линию называют Curve direction of top curve 1.
Нажмите кнопку Use Selected Feature. Панель визуализации обновляет остроумие ось X системы координат, отображенной красным, частично выровненным с выбранной линией.
Эти два не полностью выравниваются, когда выбранная линия не лежит на нормальной плоскости первичной оси. Вторичная ось является поэтому проекцией выбранной линии на нормальную плоскость первичной оси.
Чтобы сохранить систему координат, вы задали, и передайте ее модели:
Нажмите кнопку Save. Панель визуализации показывает тело с окончательной версией системы координат, которую вы задали.
В основном интерфейсе диалогового окна блока Solid выберите OK или Apply. Блок Solid передает новую систему координат модели и осушает новый порт системы координат, помеченный системой координат, называют вас заданными.
