Соединения налагают между телами первичные кинематические ограничения, которые определяют, как они могут переместиться друг относительно друга. Соединение может быть физическим соединением, таким как это между случаем и валом линейного гидравлического привода или виртуальной связью, такой как это между Землей и луной. В Simscape™ Multibody™ вы моделируете оба типа подключения с помощью Блоков соединений.
Примеры физических и виртуальных связей между телами

Механизм и Ограничительные блоки также налагают кинематические ограничения между телами. Как блоки соединений отличаются? В то время как Механизм и Ограничительные блоки параметрируются в терминах числа степеней свободы, они удаляют между телами, Блоки соединений параметрируются в терминах числа степеней свободы, которое они обеспечивают через модули, названные объединенными примитивами.
Каждый Блок соединений соединяет точно два тела. Такая связь определяет максимальные степени свободы или число степеней свободы, что смежные тела могут совместно использовать. Это число степеней свободы лежит в диапазоне от нуля в блоке Weld Joint к шесть — три поступательных и три вращательных — в Соединении 6-DOF и Густо разрастающихся Блоках соединений. Перевод относится к изменению в положении и вращении к изменению в ориентации.
Объединенное число степеней свободы является мерой объединенной мобильности. Устраняя другие ограничения в модели, соединение с большим количеством числа степеней свободы позволяет большую свободу движения между смежными телами. Объединенное число степеней свободы также имеет математическую интерпретацию. Они - минимальное количество переменных состояния, должен был полностью определить настройку соединения на каждом временном шаге в процессе моделирования.
Рассмотрите прямоугольное соединение. Это соединение позволяет перевод в плоскости, и это поэтому имеет два поступательных числа степеней свободы — один для каждой пространственной размерности. На каждом временном шаге объединенная настройка полностью определяется переменными с двумя состояниями, координатами положения в плоскости движения [x(t), y(t)]. Это означает, например, что можно полностью предписать движение в этом соединении с помощью двух входных сигналов положения.
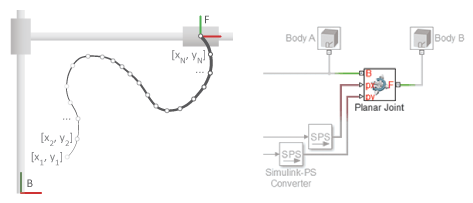
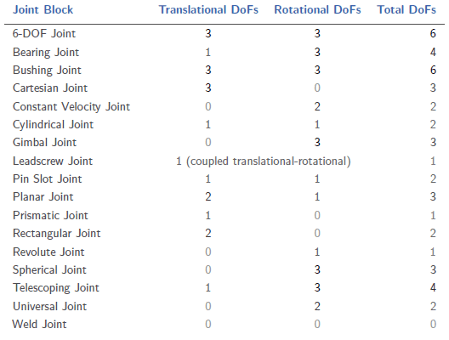
Таблица суммирует число степеней свободы, которое обеспечивают различные Блоки соединений.
Фактическое число степеней свободы в соединении часто - меньше в номере, чем одно только соединение позволило бы. Это происходит, когда кинематические ограничения в другом месте в модели ограничивают относительное движение смежных тел. Такие ограничения могут явиться результатом механизмов в mesh, запрещенное число степеней свободы из-за других соединений в закрытых кинематических замкнутых цепях, и зафиксированных расстояний и углов между телами, среди других факторов.
Блоки соединений являются выборами объединенных примитивов, основными все же полными соединениями различных видов, которые вы не можете анализировать дальше — по крайней мере, не теряя поведение, такое как вращательно-поступательная связь ведущего соединения винта. Объединенные примитивы располагаются в номере от нуля в блоке Weld Joint к шесть в Густо разрастающемся Блоке соединений. Существует пять объединенных примитивов:
Призматический — Позволяет перевод вдоль одной стандартной оси (x, y, или z). Блоки соединений могут содержать до трех призматических объединенных примитивов, один для каждой поступательной степени свободы. Призматические примитивы помечены P*, где звездочка обозначает ось движения, e.g., Пкс, Py или Pz.
Вращательный — Позволяет вращение вокруг одной стандартной оси (x, y, или z). Блоки соединений могут содержать до трех примитивов шарнирного соединения, один для каждой вращательной степени свободы. Вращательные примитивы помечены R*, где звездочка обозначает ось движения, e.g., Rx, Рай, или С пассивной паузой.
Сферический — Позволяет вращение вокруг любой 3-D оси, [x, y, z]. Блоки соединений содержат не больше, чем один сферический примитив, и никогда в сочетании с вращательными примитивами. Сферические примитивы помечены S.
Ведущий Примитивный Винт — Позволяет связанное вращение и перевод на стандартной оси (e.g. Z. Этот примитив преобразования между вращением в одном конце и переводом в другом. Блоки соединений содержат не больше, чем один ведущий примитивный винт. Ведущие примитивы винта помечены LS*, где звездочка обозначает ось движения.
Постоянное Скоростное Соединение — Позволяет вращение при постоянной скорости между пересечением хотя произвольно выровненные валы. Блоки соединений содержат не больше, чем одну постоянную примитивную скорость. Постоянные скоростные примитивы помечены CV.
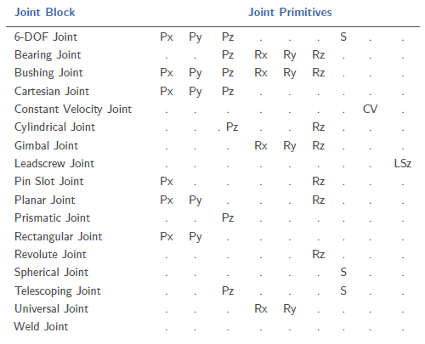
Таблица суммирует объединенные примитивы и число степеней свободы, которое обеспечивают различные Блоки соединений.
Почему Блоки соединений использования со сферическими примитивами? Те с тремя вращательными примитивами восприимчивы, чтобы установить в карданном подвесе блокировку — естественная, но часто нежелательная потеря одной вращательной степени свободы, когда любые две оси вращения становятся выровненными. Блокировка карданова подвеса приводит к ошибкам симуляции из-за числовой сингулярности. Сферические примитивы устраняют риск ошибок блокировки карданова подвеса путем представления 3-D вращений с помощью 4-D количества, известные как кватернионы.
Соединения Simscape Multibody идеализированы. Они отличаются от действительных соединений в этом, у них нет инерции — подходящее приближение в большинстве моделей, где удар объединенной инерции на системной динамике часто незначителен. Дело обстоит так, например, в соединениях постоянной скорости автомобильных систем автомобильной трансмиссии, где инерция вала может затмить объединенную инерцию.
Если объединенная инерция важна в вашей модели, можно объяснить его с помощью блоков Тела или Инерции. Соедините порты системы координат блока с соответствующими объединенными системами координат и задайте объединенные инерционные свойства в диалоговых окнах блока. Можно задать объединенную массу или плотность, продукты инерции, моменты инерции и центр массы. Для получения дополнительной информации о том, как задать инерцию, смотрите Представляющую Твердую Инерцию.
