Трехфазный постоянный магнит синхронная машина с синусоидальной или трапециевидной противоэлектродвижущей силой или пятифазовый постоянный магнит синхронная машина с синусоидальной противоэлектродвижущей силой
Simscape / Электрический / Специализированные Энергосистемы / Электрические Машины
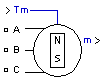
Блок Permanent Magnet Synchronous Machine реализует трехфазное или пятифазовый постоянный магнит синхронная машина. Обмотки статора соединяются в Уае с внутренней нейтральной точкой.
Трехфазная машина может иметь синусоидальную или трапециевидную форму волны коэффициента противо-ЭДС. Ротор может быть круглым или существенно-полюсным для синусоидальной машины. Ротор кругл, когда машина трапециевидна. Предварительно установленные модели доступны для синусоидальной машины коэффициента противо-ЭДС.
Пятифазовая машина имеет синусоидальную форму волны коэффициента противо-ЭДС и круглый ротор.
Блок Permanent Magnet Synchronous Machine действует или в генераторе или в моторном режиме. Режим работы диктует знак механического крутящего момента (положительный для моторного режима, отрицательного для режима генератора). Электрические и механические детали машины каждый представлены моделью в пространстве состояний второго порядка.
Синусоидальная модель принимает, что поток, установленный постоянными магнитами в статоре, является синусоидальным, который подразумевает, что электродвижущие силы являются синусоидальными.
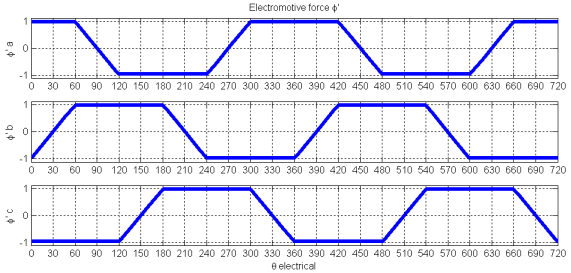
Трапециевидная модель принимает, что извилистое распределение и поток, установленный постоянными магнитами, производят три трапециевидных формы волны коэффициента противо-ЭДС.
Эти уравнения описываются в системе координат ротора (qd система координат). Все количества в системе координат ротора отнесены в статор.
Lq, Ld | q - ось и d - составляющие индукции |
R | Сопротивление обмоток статора |
IQ, ID | q - ось и d - токи оси |
vq, vd | q - ось и d - напряжения оси |
ωm | Скорость вращения ротора |
λ | Амплитуда потока вызвана постоянными магнитами ротора в фазах статора |
p | Количество пар полюсов |
Te | Электромагнитный крутящий момент |
Lq и индуктивность Ld представляют отношение между индуктивностью фазы и положением ротора из-за выступа ротора. Например, индуктивностью, измеренной между фазой A и B (когда фазу C оставляют открытой), дают:
где Θe представляет электрический угол.
Следующий рисунок показывает изменение индуктивности от фазы к фазе в функции электрического угла ротора.

Для круглого ротора нет никакого изменения индуктивности фазы:
Для существенного круглого ротора dq индуктивностью дают:
Эти уравнения описываются в системе координат ротора с помощью расширенного преобразования Парка (q1d1 и система координат q2d2). Все количества в системе координат ротора отнесены в статор.
L | Индуктивность якоря |
R | Сопротивление обмоток статора |
iq1, id1 | q1 - ось и d1 - токи оси |
vq1, vd1 | q1 - ось и d1 - напряжения оси |
iq2, id2 | q2 - ось и d2 - токи оси |
vq2, vd2 | q2 - ось и d2 - напряжения оси |
ωm | Скорость вращения ротора |
λ | Амплитуда потока вызвана постоянными магнитами ротора в фазах статора |
p | Количество пар полюсов |
Te | Электромагнитный крутящий момент |
Эти уравнения описываются в системе координат фазы (система координат abc). Обратите внимание на то, что индуктивность фазы Ls принят постоянным и не меняется в зависимости от положения ротора.
Ls | Индуктивность обмоток статора |
R | Сопротивление обмоток статора |
ia, ib, ic | a, b и c токи фазы |
Φa', Φb', Φc' | a, b и c фаза электродвижущие силы, значение в относительных единицах к амплитуде потока λ |
vab, vbc | ab и до н.э фаза, чтобы поэтапно осуществить напряжения |
ωm | Скорость вращения ротора |
λ | Амплитуда потока вызвана постоянными магнитами ротора в фазах статора |
p | Количество пар полюсов |
Te | Электромагнитный крутящий момент |
Электродвижущая сила Φ' представлен:
J | Объединенная инерция ротора и загрузки |
F | Объединенное вязкое трение ротора и загрузка |
θ | Угловое положение ротора |
Tm | Крутящий момент механического устройства вала |
Tf | Вал статический момент трения |
ωm | Скорость вращения ротора (механическая скорость) |
Когда вы используете блоки Permanent Magnet Synchronous Machine в дискретных системах, вам придется использовать маленькую паразитную активную нагрузку, соединенную на терминалах машины, чтобы избежать числовых колебаний. Времена большой выборки требуют больших загрузок. Минимальная активная нагрузка пропорциональна шагу расчета. Помните, что с 25 μs временными шагами в системе на 60 Гц, минимальная нагрузка составляет приблизительно 2,5% степени номинала машины. Например, 200 постоянных магнитов MVA синхронная машина в энергосистеме, дискретизированной с 50 μs шагами расчета, требуют приблизительно 5% активной нагрузки или 10 МВт. Если шаг расчета уменьшается до 20 μs, активная нагрузка 4 МВт достаточна.
Блок Permanent Magnet Synchronous Machine принимает линейную магнитную схему без насыщения железа ротора и статора. Это предположение может быть сделано из-за большого воздушного зазора, обычно находимого в постоянном магните синхронные машины.
m — Машина внутренние измеренияВектор, содержащий сигналы измерения. Блок возвращает вектор с 13 элементами, когда Number of phases установлен в 3, и вектор с 16 элементами, когда Number of phases установлен в 5. Доступные сигналы зависят от модели, которую вы выбрали. Можно демультиплексировать эти сигналы при помощи блока Bus Selector, обеспеченного в Simulink® библиотека. Сигналы включают:
Имя | Определение | Модули | Модель |
|---|---|---|---|
МСФО | Статор текущий is_a | A | Все |
ibs | Статор текущий is_b | A | Все |
ics | Статор текущий is_c | A | Все |
идентификаторы | Статор текущий is_d | A | Пятифазовый синусоидальный |
ies | Статор текущий is_e | A | Пятифазовый синусоидальный |
IQ | Статор текущий is_q | A | Трехфазный синусоидальный |
идентификаторы | Статор текущий is_d | A | Трехфазный синусоидальный |
iqs1 | Статор текущий is_q1 | A | Пятифазовый синусоидальный |
ids1 | Статор текущий is_d1 | A | Пятифазовый синусоидальный |
iqs2 | Статор текущий is_q2 | A | Пятифазовый синусоидальный |
ids2 | Статор текущий is_d2 | A | Пятифазовый синусоидальный |
vqs | Напряжение статора Vs_q | V | Трехфазный синусоидальный |
vds | Напряжение статора Vs_d | V | Трехфазный синусоидальный |
vqs1 | Напряжение статора Vs_q1 | V | Пятифазовый синусоидальный |
vds1 | Напряжение статора Vs_d1 | V | Пятифазовый синусоидальный |
vqs2 | Напряжение статора Vs_q2 | V | Пятифазовый синусоидальный |
vds2 | Напряжение статора Vs_d2 | V | Пятифазовый синусоидальный |
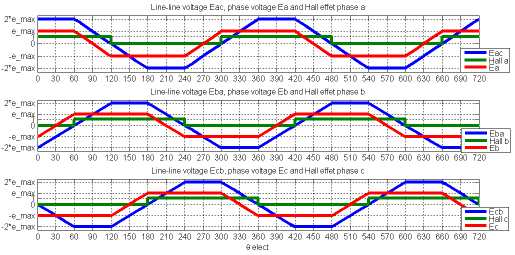
EA | Коэффициент противо-ЭДС фазы e_a | V | Трехфазный трапециевидный |
eb | Коэффициент противо-ЭДС фазы e_b | V | Трехфазный трапециевидный |
ЕС | Коэффициент противо-ЭДС фазы e_c | V | Трехфазный трапециевидный |
ха | Эффект Холла сигнализирует о h_a* | логический (0 или 1) | Трехфазный, синусоидальный и трапециевидный |
hb | Эффект Холла сигнализирует о h_b* | логический (0 или 1) | Трехфазный, синусоидальный и трапециевидный |
hc | Эффект Холла сигнализирует о h_c* | логический (0 или 1) | Трехфазный, синусоидальный и трапециевидный |
w | Скорость ротора wm | рад/с | Все |
theta | Угол ротора thetam | рад | Все |
Te | Электромагнитный крутящий момент Те | N.m | Все |
Сигнал эффекта Холла обеспечивает логическую индикацию относительно расположения коэффициента противо-ЭДС. Этот сигнал очень полезен, чтобы непосредственно управлять выключателями питания. Существует изменение состояния при каждом нулевом пересечении напряжения от фазы к фазе. Эти сигналы должны декодироваться прежде чем быть примененным к переключателям.
Number of phases — Количество фаз для модели машины5Выберите между трехфазной моделью машины или пятифазовой моделью машины.
Back EMF waveform — Электродвижущая силаSinusoidal (значение по умолчанию) | TrapezoidalВыберите между Sinusoidal и Trapezoidal электродвижущая сила.
Чтобы включить этот параметр, установите Number of phases на 3.
Rotor type — Тип ротораRound (значение по умолчанию) | Salient-poleВыберите между Salient-pole и Round роторы.
Чтобы включить этот параметр, установите Number of phases на 3 и набор Back EMF waveform к Sinusoidal.
Mechanical input — Тип входаTorque Tm (значение по умолчанию) | Speed w | Mechanical rotational portВыберите, предоставляется ли введенный крутящим моментом, применился к валу, скорости ротора или валу машины, представленному Simscape™ вращательный механический порт.
Выберите Torque Tm задавать вход крутящего момента в N.m и отсоединять Tm порт. Скорость машины определяется Инерцией машины J и различием между прикладной механической TM крутящего момента и внутренним электромагнитным крутящим моментом Те. Соглашение знака для механического крутящего момента состоит в том, когда скорость положительна. Положительный сигнал крутящего момента указывает на моторный режим, и отрицательный сигнал указывает на режим генератора.
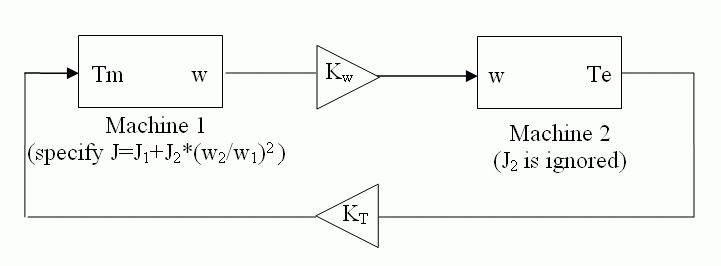
Выберите Speed w задавать вход скорости в rad/s и отсоединять w порт. Скорость машины наложена, и механическая деталь модели (Инерция J) проигнорирована. Используя скорость, когда механический вход позволяет моделировать механическое устройство, связывающееся между двумя машинами.
Следующая фигура указывает, как смоделировать жесткое соединение вала в моторной генераторной установке, когда момент трения проигнорирован в машине 2. Выход скорости машины 1 (двигатель) соединяется с входом скорости машины 2 (генератор), в то время как машина 2 электромагнитных крутящих момента выход, Те, применяется к механическому входу крутящего момента машины 1, TM. Фактор Kw учитывает единицы скорости обеих машин (pu или rad/s) и отношение коробки передач w2/w1. Фактор KT учитывает модули крутящего момента обеих машин (pu или N.m) и оценки машины. Кроме того, потому что инерция, J2 проигнорирован в машине 2, J2, добавляется к машине 1 инерция, J1.
Выберите Mechanical rotational port чтобы осушить порт вращательного механического устройства Simscape, который позволяет, вы, чтобы соединить вал машины с другим Simscape блокируетесь с портами вращательного механического устройства.
Следующая фигура указывает, как соединить блок Ideal Torque Source с библиотеки Simscape на вал машины, чтобы представлять машину в моторном режиме или в режиме генератора.
Preset model — Электрические и механические параметры No (значение по умолчанию) | 01: 0.8 Nm 300 Vdc 3000 RPM - 0.8 Nm | 02: 1.7 Nm 300 Vdc 3750 RPM - 1.7 Nm | ...Предопределенные электрические и механические параметры для различного постоянного магнита синхронные моторные оценки крутящего момента (N.m), напряжение на шине DC (V), оцененная скорость (об/мин) и непрерывный крутящий момент останова (N.m).
Выберите одну из предварительно установленных моделей, чтобы загрузить соответствующие электрические и механические параметры в записях диалогового окна. Выберите No (значение по умолчанию), если вы не хотите использовать предварительно установленную модель, или если вы хотите изменить некоторые параметры предварительно установленной модели.
Доступные предварительно установленные модели:
No
01: 0.8 Nm 300 Vdc 3000 RPM - 0.8 Nm
02: 1.7 Nm 300 Vdc 3750 RPM - 1.7 Nm
03: 2.8 Nm 300 Vdc 4250 RPM - 3.2 Nm
04: 6 Nm 300 Vdc 4500 RPM - 6 Nm
05: 8 Nm 300 Vdc 2000 RPM - 10 Nm
06: 10 Nm 300 Vdc 2300 RPM - 14.2 Nm
07: 20 Nm 300 Vdc 2200 RPM - 33.9 Nm
08: 24 Nm 300 Vdc 2300 RPM - 41.4 Nm
09: 7.14 Nm 560 Vdc 5000 RPM - 8.3 Nm
10: 7.71 Nm 560 Vdc 5000 RPM - 10.2 Nm
11: 26.13 Nm 560 Vdc 3000 RPM - 27.3 Nm
12: 35.17 Nm 560 Vdc 3000 RPM - 37.4 Nm
13: 42.09 Nm 560 Vdc 3000 RPM - 45.6 Nm
14: 67.27 Nm 560 Vdc 1700 RPM - 70.2 Nm
15: 87.75 Nm 560 Vdc 3000 RPM - 97.96 Nm
16: 111 Nm 560 Vdc 3000 RPM - 126 Nm
Когда вы выбираете предварительно установленную модель, электрические и механические параметры во вкладке Parameters диалогового окна отключены. Начать с данной предварительно установленной модели и затем изменить параметры машины:
Выберите предварительно установленную модель, для которой вы хотите инициализировать параметры.
Измените Preset model в No. Это не изменяет параметры машины во вкладке Parameters.
Измените параметры машины, затем нажмите Apply.
Чтобы включить этот параметр, установите Number of phases на 5, или набор Number of phases к 3 и Back EMF waveform к Sinusoidal.
Use signal names to identify bus labels — Идентифицируйте с именами сигнала или определением сигналаoff (значение по умолчанию) | onКогда выбрано, измерение вывело, использует имена сигнала, чтобы идентифицировать метки шины. Выберите эту опцию для приложений, которые требуют, чтобы метки сигнала шины имели только алфавитно-цифровые символы.
Когда очищено, измерение вывело, использует определение сигнала, чтобы идентифицировать метки шины. Метки содержат неалфавитно-цифровые символы, которые несовместимы с некоторыми приложениями Simulink.
Stator phase resistance Rs (Ohm) — Сопротивление фазы StatorRS сопротивления фазы Stator (Ω).
Stator phase inductance Ls (H) — Фаза Stator к нейтральной индуктивности8.5e-3 (значение по умолчанию) | положительная скалярная величинаФаза Stator к нейтральной индуктивности Ls (H) трапециевидной модели.
Чтобы включить этот параметр, установите Number of phases на 3 и Back EMF waveform к Trapezoidal.
Inductances [ Ld(H) Lq(H) ] — Фаза к нейтральной индуктивности[8.5e-3,8.5e-3] (значение по умолчанию) | двухэлементный векторPhase-to-neutral Ld (H) и Lq (H) индуктивность в d - ось и q - ось синусоидальной модели с существенно-полюсным ротором.
Чтобы включить этот параметр, установите Number of phases на 3, Back EMF waveform к Sinusoidal, и Rotor type к Salient-pole.
Armature inductance (H) — Индуктивность якоря синусоидальной модели Индуктивность якоря синусоидальной модели с круглым ротором. Ld равен Lq.
Чтобы включить этот параметр, установите Number of phases на 3, Back EMF waveform к Sinusoidal, и Rotor type к Round.
Specify — Постоянная машинаFlux linkage established by magnets (V.s) (значение по умолчанию) | Voltage Constant (V_peak L-L / krpm) | Torque Constant (N.m / A_peak)Машина, постоянная для параметризации блока. Если вы выбираете константу, можно ввести ее значение в соответствующее поле параметра, в то время как другие два параметра отключены.
Flux linkage — Постоянный потокПостоянный поток λ (Вб) на пары полюса вызван в обмотках статора магнитами.
Чтобы включить этот параметр, установите Specify на Flux linkage established by magnets (V.s).
Voltage constant — Пиковая линия к линейному напряжениюПиковая линия к линейному напряжению на 1 000 об/мин. Это напряжение представляет пиковое напряжение разомкнутой цепи, когда машина управляется как генератор на уровне 1 000 об/мин.
Чтобы включить этот параметр, установите Specify на Voltage Constant (V_peak L-L / krpm).
Torque constant — Закрутите на постоянный амперЗакрутите на постоянный ампер. Эта константа принимает, что машина управляется инвертором, который обеспечивает идеальную синхронизацию между током и коэффициентом противо-ЭДС.
Синусоидальная модель: Принята текущая синусоида. Для получения дополнительной информации смотрите ac6_example_simplified.
Трапециевидная модель: Принято квадратное текущее изделие. Для получения дополнительной информации смотрите ac7_example_simplified.
Чтобы включить этот параметр, установите Specify на Torque Constant (N.m / A_peak).
Back EMF flat area (degrees) — Ширина стрижки под ежикаШирина стрижки под ежика в течение половины периода электродвижущей силы Φ' (степени) для трапециевидной машины.
Чтобы включить этот параметр, установите Number of phases на 3 и Back EMF waveform к Trapezoidal.
Inertia, viscous damping, pole pairs, static friction [ J(kg.m^2) F(N.m.s) p() Tf(N.m)] — Механические параметрыОбъединенная машина и коэффициент инерции загрузки J (kg.m2), объединенный коэффициент вязкого трения F (N.m.s), подоприте шестами пары p и вал статическое трение Tf (N.m). Если четвертое значение вектора (статическое трение) не задано, блок полагает, что это значение 0.
Чтобы включить этот параметр, установите Mechanical input на Torque Tm или Mechanical rotational port.
Pole pairs p () Количество пар полюсовКоличество пар полюса, p.
Чтобы включить этот параметр, установите Mechanical input на Speed w.
Initial conditions [ wm(rad/s) thetam(deg) ia,ib(A) ] — Начальные условия для трехфазной машиныМеханическая скорость (rad/s), механический угол Θm (степени) и мгновенный статор, текущий (A) для трехфазной машины [wm, Θm, ia, ib].
Поскольку статор соединен звездой, и нейтральная точка изолируется, текущий ic в трехфазной машине дан ic = - ia-ib.
Чтобы включить этот параметр, установите Number of phases на 3.
Initial conditions [ wm(rad/s) thetam(deg) ia,ib,ic,id(A) ] — Начальные условия для пятифазовой машиныМеханическая скорость (rad/s), механический угол Θm (степени) и мгновенный статор, текущий (A) для пятифазовой машины [wm, Θm, ia, ib, ic, ID].
Поскольку статор соединен звездой, и нейтральная точка изолируется, током т.е. в пятифазовой машине дают т.е. = - ia-ib-ic - ID.
Чтобы включить этот параметр, установите Number of phases на 5.
Rotor flux position when theta = 0 — Ссылочное положение потока ротора90 degrees behind phase A axis (modified Park) (значение по умолчанию) | Aligned with phase A axis (original Park)Ссылочное положение ротора течет относительно фазы ось.
Выберите 90 degrees behind phase A axis (modified Park) выбрать ссылочное положение ротора, представленного:
Модифицированное преобразование Парка [4] более удобно для векторного управления, потому что максимальная индукция фазы происходит в theta = 0.
Выберите Aligned with phase A axis (original Park) выбрать ссылочное положение ротора, представленного:
Чтобы включить вкладку Advanced, установите параметр Simulation type блока powergui к Discrete и, на вкладке Preferences, очистите параметр Automatically handle discrete solver and Advanced tab solver settings of blocks.
Discrete solver model — Метод интегрированияTrapezoidal non iterative (значение по умолчанию) | Trapezoidal robust | Backward Euler robustМетод интегрирования используется блоком.
Когда вы выбираете параметр Automatically handle discrete solver and Advanced tab solver settings of blocks в блоке powergui, дискретная модель решателя автоматически установлена в Trapezoidal robust.
Trapezoidal non iterative требует, чтобы вы добавили ненезначительную загрузку шунта на терминалах машины, чтобы обеспечить устойчивость симуляции, и симуляция может не сходиться и останавливается, когда количество машин увеличивается в модели.
Trapezoidal robust и Backward Euler robust позвольте вам избавлять от необходимости использовать паразитные загрузки. Чтобы устранить топологические ошибки машин, соединенных с индуктивной схемой (например, выключатель, соединенный последовательно с машиной), машина моделирует незначительную внутреннюю загрузку 0.01% из номинальной степени.
Trapezoidal robust немного более точно, чем Backward Euler robust, особенно, когда модель симулирована в больших шагах расчета. Trapezoidal robust может произвести небольшие ослабленные числовые колебания на напряжении машины в условиях без загрузок, в то время как Backward Euler robust предотвращает колебания и обеспечивает точность.
Для получения дополнительной информации о какой метод использовать в вашем приложении, смотрите Симуляцию Дискретизированные Электрические системы.
Sample time (-1 for inherited) — Шаг расчета используется блокомШаг расчета используется блоком. Чтобы наследовать шаг расчета, заданный в блоке powergui, установите этот параметр на -1 (значение по умолчанию).
power_brushlessDCmotor пример иллюстрирует использование блока Permanent Magnet Synchronous Machine.
[1] Grenier, D., лос-анджелесский Dessaint, О. Ахриф, И. Боннэссиукс и Б. Лепайоуфл. “Экспериментальное нелинейное управление крутящим моментом постоянного магнита синхронный двигатель Используя выступ”. IEEE® Транзакции на Industrial Electronics, Издании 44, № 5, октябрь 1997, стр 680-687.
[2] Toliyat, H.A. “Анализ и Симуляция Многофазных Дисков Асинхронного двигателя Переменной скорости При Асимметричных Связях”. Прикладная Конференция по Силовой электронике и Выставка, Издание 2, март 1996, стр 586-592.
[3] Beaudart, F., Ф. Лэбрик, Э. Матань, Д. Телтеукс и П. Александр. “Управляйте при нормальной и отказоустойчивой работе многофазных синхронных машин SMPM с механически и магнитным способом разъединенные фазы”. Международная конференция по вопросам Энергетики, энергии и Электрических Дисков, март 2009, стр 461-466.
[4] Краузе, P.C., О. Уосинкзук и С.Д. Садхофф. Анализ электрического машинного оборудования и систем приводов. Нажатие IEEE, 2002.
