AC1, AC2, AC3 и модели AC4 основаны на трехфазном асинхронном двигателе. Этот двигатель имеет трехфазную обмотку в статоре и роторе раны или роторе клетки белки. Ротор клетки белки состоит из пазов проведения панелей, встроенных в железо ротора. Панели проведения закорачиваются вместе в каждом конце ротора путем проведения звонков. Модель AC5 основана на роторе раны синхронный двигатель, и модель AC6 использует постоянный магнит синхронный двигатель. Эти электродвигатели переменного тока питаются переменным напряжением переменного тока и частотой, произведенной инвертором. Тип инвертора, используемого в шести моделях диска AC, является исходным инвертором напряжения (VSI) в том смысле, что этот инвертор питается постоянным напряжением постоянного тока. Это постоянное напряжение обеспечивается неконтролируемым диодным выпрямителем и конденсатором (емкостное напряжение на шине DC).
Когда шина DC обеспечивается диодным выпрямителем, диск не имеет двунаправленной возможности потока энергии и поэтому не может выполнить регенеративное торможение. В AC1, AC2, AC3, AC4 и моделях AC6, тормозной резистор последовательно с прерывателем гарантирует торможение системы моторной загрузки. Эта схема торможения называется динамическим торможение. Это помещается параллельно с шиной DC для того, чтобы препятствовать тому, чтобы ее напряжение увеличилось, когда двигатель замедляется. С динамическим торможение кинетическая энергия системы моторной загрузки преобразована в тепло, рассеянное в тормозном резисторе.
Инверторы VSI, используемые в моделях диска AC, основаны на двух типах модуляции, гистерезисной модуляции и модуляции ширины импульса (PWM) вектора пробела.
Гистерезисная модуляция является обратной связью текущий метод управления где моторные текущие дорожки ссылочный ток в гистерезисной полосе. Следующий рисунок показывает принцип действия гистерезисной модуляции. Контроллер генерирует синусоидальный ссылочный ток желаемой величины и частоты, которая является по сравнению с фактической моторной текущей линией. Если ток превышает верхний предел гистерезисной полосы, верхний переключатель руки инвертора выключен, и более низкий переключатель включен. В результате текущие запуски, чтобы затухнуть. Если текущие кресты нижний предел гистерезисной полосы, более низкий переключатель руки инвертора выключен, и верхний переключатель включен. В результате ток возвращается в гистерезисную полосу. Следовательно, фактический ток обеспечен, чтобы отследить ссылочный ток в гистерезисной полосе.

Следующий рисунок показывает гистерезисную текущую схему модуляции управления, состоя из трех гистерезисных компараторов, один для каждой фазы. Этот тип PWM с обратной связью используется в моделях AC3 и AC5.
Метод модуляции вектора пробела отличается от гистерезисной модуляции в этом нет отдельных компараторов, используемых для каждой из этих трех фаз. Вместо этого ссылочный вектор пробела напряжения Vs дан в целом, произведен в фиксированной частоте, и затем создан посредством соответствующей синхронизации смежных ненулевых векторов пробела напряжения инвертора V1 к V6 и нулевым векторам пробела напряжения V0, V7. Упрощенную схему инвертора VSI показывают ниже. В этой схеме состояние проводимости трех участков инвертора представлено тремя логическими переменными, SA, SB и SC. Логическая единица означает, что верхний переключатель проводит, и логический ноль означает, что более низкий переключатель проводит.
Упрощенная схема инвертора VSI PWM
В этой схеме состояние проводимости трех участков инвертора представлено тремя логическими переменными, SA, SB и SC. Логическая единица означает, что верхний переключатель включен, и логический ноль означает, что более низкий переключатель включен.
Переключение SA, SB, SC приводит к восьми состояниям для инвертора. Переключающиеся состояния и соответствующая фаза к нейтральным напряжениям получены в итоге в таблице, которая перечисляет состояния, работу инвертора и векторы напряжения пробела. Шесть активных векторов являются углом 60 градусов независимо и описывают шестиугольный контур. Два нулевых вектора в начале координат.
Как пример, для местоположения вектора Vs, показанного в схеме напряжения вектора пробела инвертора, способ сгенерировать инвертор, выход должен использовать смежные векторы V1 и V2 на базисе с частичной занятостью, чтобы удовлетворить среднему спросу на выход. Напряжение Vs может быть разрешено как:
Va и Vb являются компонентами Vs вдоль V1 и V2, соответственно. При рассмотрении периода Tc, во время которого средний выход должен совпадать с командой, пишет длительность времени двух состояний 1 и 2 и нулевого состояния напряжения как:
|
Состояние |
SA |
SB |
SC |
Работа инвертора |
Вектор напряжения пробела |
|---|---|---|---|---|---|
|
0 |
1 |
1 |
1 |
Свободный ход |
V0 |
|
1 |
1 |
0 |
0 |
Активный |
V1 |
|
2 |
1 |
1 |
0 |
Активный |
V2 |
|
3 |
0 |
1 |
0 |
Активный |
V3 |
|
4 |
0 |
1 |
1 |
Активный |
V4 |
|
5 |
0 |
0 |
1 |
Активный |
V5 |
|
6 |
1 |
0 |
1 |
Активный |
V6 |
|
7 |
0 |
0 |
0 |
Свободный ход |
V7 |
Поток статора машины AC равен напряжению статора к отношению частоты потому что
где
поэтому
Поскольку двигатель питается переменным напряжением источника переменного тока и частотой, важно обеспечить константу V/Hz в постоянной области крутящего момента, если магнитного насыщения нужно избежать. Типичную характеристику V/Hz показывают ниже. Заметьте, что прямая линия имеет маленькое повышение напряжения для того, чтобы компенсировать отбрасывание сопротивления в низкой частоте. Управление V/Hz разомкнутого контура используется с приложениями низкой динамики, такими как насосы или вентиляторы, где маленькое изменение частоты вращения двигателя с загрузкой терпимо. Модель AC1 основана на разомкнутом контуре контроллер V/Hz.
В этом типе управления команда скорости скольжения добавляется к измеренной скорости ротора, чтобы произвести желаемую частоту инвертора. Основанный на PI регулятор скорости производит команду промаха. Желаемая частота инвертора генерирует команду напряжения через характеристику V/Hz такой как один показанный выше. Модель AC2 основана на регулировке скорости с обратной связью, которая использует регулирование промаха и V/Hz.
Конструкция машины DC такова, что полевой поток перпендикулярен потоку арматуры. Будучи ортогональными, эти два потока не производят сетевого взаимодействия друг на друге. Корректировка текущего поля может поэтому управлять потоком машины DC, и крутящим моментом можно управлять независимо от потока путем корректировки тока якоря. Машина AC не так проста из-за взаимодействий между статором и полями ротора, ориентации которых не сохранены в 90 градусах, но меняются в зависимости от условий работы. Можно получить DC подобная машине эффективность в содержании фиксированной и ортогональной ориентации между полем и полями арматуры в машине AC путем ориентации статора, текущего относительно потока ротора, чтобы достигнуть независимо управляемого потока и крутящего момента. Такая схема управления называется ориентированным на поток управлением или векторным управлением. Векторное управление применимо и к индукции и к синхронным двигателям. Мы будем видеть теперь, как это применяется к асинхронным двигателям.
Рассмотрение d-q модели асинхронной машины в системе координат, вращающейся на синхронной скорости ωe,
где
Ориентированное на поле управление подразумевает, что компонент ids текущего статора был бы выровнен с полем ротора, и компонент iqs будет перпендикулярен ids. Это может быть выполнено путем выбора ωe, чтобы быть скоростью потока ротора и блокировки фазы системы системы координат, таким образом, что поток ротора выравнивается точно с d осью, приводящей к
и
который подразумевает это
и это
Это также следует за этим
Аналогия с эффективностью машины DC теперь ясна. Электрический крутящий момент пропорционален компоненту iqs, тогда как отношение между потоком φr и компонентом ids дано линейной передаточной функцией первого порядка с постоянной времени Lr / Rr.
Вы не можете непосредственно измерить ориентацию потока ротора в асинхронной машине ротора клетки белки. Это может только быть оценено от терминальных измерений. Альтернативный путь состоит в том, чтобы использовать отношение промаха, выведенное выше, чтобы оценить положение потока относительно ротора, как показано. Последняя схема управления называется косвенным ориентированным на поле управлением и используется в модели AC3.

Ориентированное на поле управление является привлекательным методом управления, но оно имеет серьезный недостаток: это полагается в большой степени на точное знание параметров двигателя. Постоянная времени ротора особенно затрудняет, чтобы измериться точно, и она меняется в зависимости от температуры.
Более устойчивый метод управления состоит сначала в оценке потока статора машины и электрического крутящего момента в стационарной системе координат от терминальных измерений. Следующие отношения используются:
Предполагаемым потоком статора и электрическим крутящим моментом затем управляют непосредственно путем сравнения их с их соответствующими потребованными значениями с помощью гистерезисных компараторов. Выходные параметры этих двух компараторов затем используются в качестве входных сигналов оптимальной таблицы переключения. Следующая таблица выводит соответствующее состояние переключения для инвертора.
Переключение таблицы векторов пробела инвертора
|
| S1 | S2 | S (3) | S (4) | S (5) | S (6) |
|---|---|---|---|---|---|---|---|
1 | 1 | V2 | V3 | V4 | V5 | V6 | V1 |
0 | V0 | V7 | V0 | V7 | V0 | V7 | |
-1 | V6 | V1 | V2 | V3 | V4 | V5 | |
-1 | 1 | V3 | V4 | V5 | V6 | V1 | V2 |
0 | V7 | V0 | V7 | V0 | V7 | V0 | |
-1 | V5 | V6 | V1 | V2 | V3 | V4 |
В этом примере вы создаете и симулируете эту простую систему приводов асинхронного двигателя:
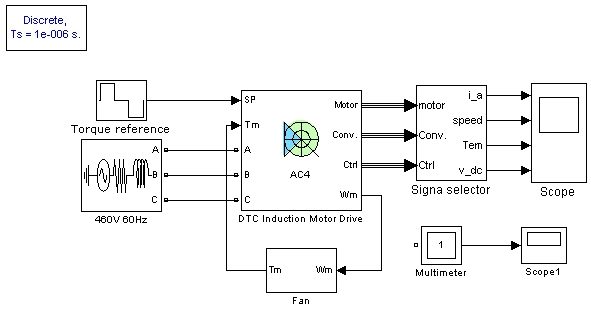
Пример иллюстрирует использование модели AC4 с набором параметров асинхронного двигателя на 200 л. с. во время регулирования крутящего момента. Блок AC4 моделирует диск DTC. Во время этого примера двигатель соединяется с вентилятором, и его реакция закрутить шаги симулирована.
Откройте ac4_example путем ввода ac4_example в MATLAB® подсказка.
В этом примере мы будем управлять асинхронным двигателем на 200 л. с. 460-вольтового номинального напряжения якоря и номинальной частоты на 60 Гц. Как задано в примере DC, исходная амплитуда напряжения и значения частоты, необходимые для каждой модели диска, могут быть найдены в ссылочных заметках. Номинальная стоимость соответствующих двигателей также включена. Таблица содержит значения, соответствующие модели на 200 л. с. AC4.
Управляйте входным напряжением | Амплитуда | 460 В |
Частота | 60 Гц | |
Моторная номинальная стоимость | Степень | 200 л. с. |
Скорость | 1 800 об/мин | |
Напряжение | 460 В |
Установите амплитуду напряжения источника переменного тока и значения частоты к 460 В и 60 Гц, соответственно.
Установите значение напряжения RMS от фазы к фазе источника переменного тока к 460 В и частоту к 60 Гц. Назовите источник переменного тока 460 V 60 Hz.
Чтобы представлять реальный трехфазный источник, необходимо задать правильное исходное сопротивление R и индуктивность L значения.
Установите значение сопротивления источника переменного тока к 0,0056 Ω и индуктивность к 0,15 мГн.
Вход Tm блока AC4 представляет крутящий момент нагрузки, применился к валу асинхронного двигателя. В этом случае крутящий момент нагрузки отклонен вентилятором. Этот тип крутящего момента обычно является квадратичной функцией скорости, как показано в уравнении 1:
| (1) |
где ωm является скоростью в rad/s, и Nm является скоростью в об/мин.
Создайте подсистему следующей фигуры и назовите ее Fan.
![]()
Постоянный K должен быть наложен так, чтобы на номинальной скорости, двигатель разработал номинальный крутящий момент. Этот крутящий момент может быть определен с помощью уравнения 4. Используя это уравнение, существует номинальная стоимость 790 N.m. Наконец, уравнение 1 дает значение K 0,022.
Установите постоянное значение K к 0,022.
Соедините блок Fan с блоком.
Теперь задайте вход сетбола (SP) AC4. В данном примере крутящим моментом асинхронного двигателя управляют, и серия сетболов крутящего момента наложена. Серия сетболов может быть задана с помощью блока Stair Generator.
Блок Stair Generator, соединенный с входом сетбола блока AC4, генерирует сигнал, изменяющийся в требуемые времена. Во время этого примера сгенерируйте следующий ряд крутящего момента.
t (s) | Закрутите сетбол (N.m) |
|---|---|
0 | 0 |
0.02 | 600 |
0.25 | 0 |
0.5 | -600 |
0.75 | 0 |
Установите поле Time блока Stair Generator к [0.02 0.25 0.5 0.75]. Установите поле Amplitude блока theStair Generator к [600 0 -600 0].
Используйте модель AC4 выходные параметры, чтобы визуализировать интересные сигналы, такие как:
Значение крутящего момента двигателя и сетбол
Частота вращения двигателя
Моторный модуль потока
Двигатель statoric токи
Напряжение на шине DC
Все моторные значения переменных могут быть считаны через Моторный вектор. Вектор Conv. содержит все связанные с конвертером данные. Вектор Ctrl включает все опорные сигналы и другие значения управления.
Содержимое вектора Conv. может быть легко определено путем добавления блока Multimeter в модель.
После описания операции ввода-вывода ссылочных заметок опорный сигнал крутящего момента является первым сигналом выходного вектора Ctrl.
Откройте диалоговое окно Scope Parameters. На вкладке theGeneral, определенной номер осей к 5, установите область значений времени симуляции на auto, и используйте децимацию 25. Снимите флажок Limit Data Points to last на вкладке Data history. Соедините пять выходных параметров блока Signal Selector к входным параметрам осциллографа.
Чтобы симулировать вашу систему, необходимо теперь задать правильный шаг времени симуляции и установить опцию решателя фиксированного шага. Рекомендуемые значения шага расчета для дисков DC, дисков AC и механических моделей находятся в разделах Комментариев соответствующих страниц с описанием блока. Рекомендуемый шаг расчета для модели AC4 составляет 1 мкс.
Откройте блок Powergui. Установите Simulation type на Discrete. Установите Sample time на 1 µs.
Во вкладке Simulation нажмите Model Settings. Выберите Solver. Под Solver selection выберите fixed-step и Discrete (no continuous states). Установите Stop time на 1 s и Fixed-step size к 1e-6.
Прежде, чем симулировать вашу схему, необходимо сначала установить правильные внутренние параметры AC4.
Как объяснено в примере DC, много моделей диска имеют два набора параметров: набор малой мощности и мощный набор. По умолчанию все модели первоначально загружаются с набором малой мощности. Параметры модели AC4 в настоящее время загружены в ac4_example те из диска на 3 л. с.
Вы теперь устанавливаете мощные параметры диска, которые являются теми из диска на 200 л. с. Для этого вы используете кнопку Load пользовательского интерфейса, как задано в примере DC:
Чтобы загрузить параметры на 200 л. с., нажмите кнопку Load.
Выберите ac4_200hp.matфайл и нажимает Load.
Параметры на 200 л. с. теперь загружаются.
Обратите внимание на то, что значения инерции, в настоящее время заданные в каждой модели AC and DC, являются инерцией “без загрузок”, которая только представляет инерцию ротора. Если двигатель связывается с загрузкой, эти значения должны быть увеличены инерцией загрузки. В этом случае текущее значение инерции составляет 3.1 kg*m^2. Примите, что объединенная инерция двигателя и вентилятора составляет 10 kg*m^2. Обратите внимание на то, что использование гибкого вала, соединенного между двигателем и вентилятором, позволило бы разъединяться инерции загрузки и двигателя. В этом случае значение инерции блока AC4 только было бы суммой инерции вала и ротора.
В разделе Asynchronous Machine диалогового окна измените значение инерции в 10 kg*m^2.
Нажмите OK, чтобы применить изменения и закрыть диалоговое окно.
Трехфазный инвертор системы DTC питается напряжением постоянного тока, произведенным трехфазным диодным выпрямителем. Конденсатор, расположенный при выходе выпрямителя, уменьшает пульсации напряжения на шине DC. Тормозящий блок прерывателя был также добавлен между блоком выпрямителя и блоком инвертора, для того, чтобы ограничить напряжение на шине DC, когда двигатель возвращает энергию к диску (показанный ниже). Эта энергия рассеивается через сопротивление, когда напряжение на шине DC слишком высоко.
Параметры тормозящего прерывателя доступны в разделе Converters and DC bus диалогового окна.
Тормозящие параметры прерывателя в настоящее время устанавливаются, чтобы ограничить напряжение на шине DC приблизительно 700 В. Относительно степени P, который будет рассеян и напряжение на шине DC, ограничивает Vlim, можно использовать следующее уравнение, чтобы установить значение сопротивления прерывателя:
Сопротивление 3,3 Ω рассеет 200 л. с. на уровне 700 В.
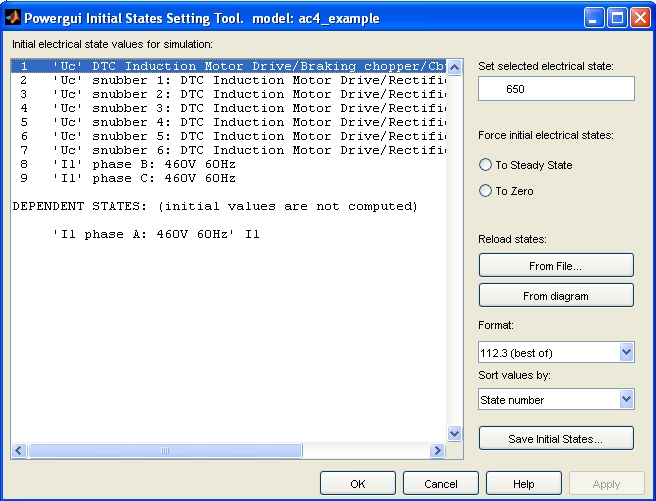
Заметьте, что емкость шины DC имеет большое значение, чтобы уменьшать пульсации напряжения постоянного тока до маленьких значений. Модель AC4 не включает систему предварительной нагрузки конденсатора шины DC. Если вы начинаете симуляцию со слишком маленького начального напряжения на шине, слишком высокие начальные токи чертятся от выпрямителя, чтобы заряжать конденсатор. Эти значения тока высокого напряжения могли повредить реальную систему. Необходимо установить начальное значение напряжения на шине DC, чтобы избежать таких токов. Это начальное напряжение на шине должно быть равно исправленному пиковому значению источника переменного тока. Если исходная амплитуда напряжения переменного тока равна 460-вольтовой RMS, исправленное напряжение на шине DC, полученное с конденсатором, является приблизительно 460 × V.
Откройте инструмент Initial States блока powergui. Установите Uc_DTC Induction Motor Drive/Braking chopper/Cbus значение к 650 V. Нажмите Apply и затем Close.
Устанавливание значения напряжения начальной буквы шины DC
Система управления AC4 имеет две основных части, контроллер скорости и крутящий момент и контроллер потока (DTC). Информация об этих двух частях находится в соответствующих ссылочных заметках. Для быстрой идеи внутренней структуры системы управления накопителями схематическое доступно в пользовательском интерфейсе модели. Откройте схематику, связанную с моделью AC4.
Откройте пользовательский интерфейс. Кликните по разделу Controller и затем кнопке Schematic. Необходимо видеть показанную схематику контроллера.
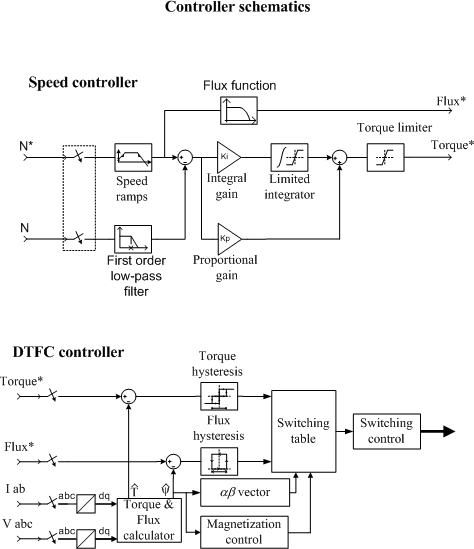
Контроллер скорости состоит из простого пропорционально-интегрального регулятора. Параметры этого контроллера являются пропорциональным и интегральными составляющими, значениями изменения скорости, частотой среза фильтра lowpass, пределами ссылки крутящего момента, и время выборки. В этом примере мы будем только управлять крутящим моментом двигателя; контроллер скорости не используется. Относитесь, чтобы Установить диспетчера DC3 Параметерса и Результаты симуляции для получения дополнительной информации о том, как обрезать ПИ-контроллер.
Относительно контроллера DTC, нет очень, чтобы обрезать. Параметры являются крутящим моментом и полосами пропускания потока, начальным потоком машины, максимальной частотой переключения и контроллером DTC время выборки. Все эти параметры уже обрезаются и не должны обычно изменяться.
Режим регулирования по умолчанию является регулированием скорости. Для того, чтобы иметь регулирование крутящего момента, необходимо изменить режим регулирования в разделе Controller пользовательского интерфейса.
В разделе Controller пользовательского интерфейса выберите Torque regulation для поля Regulation type. Нажмите OK, чтобы применить изменения и закрыть диалоговое окно.
Схема теперь готова к симуляции.
Наблюдайте быстрый ответ крутящего момента двигателя на изменения сетбола крутящего момента. С 0,02 с до 0,25 с скорость вентилятора увеличивается из-за 600 ускоряющих крутящих моментов N.m, произведенных асинхронным двигателем. В t = 0,25 с, электромагнитный крутящий момент спрыгивает к 0 N.m и уменьшениям скорости из-за крутящего момента нагрузки, отклоненного вентилятором. В t = 0,5 с, крутящий момент двигателя разрабатывает-600 крутящих моментов N.m и позволяет тормозить вентилятора. Во время тормозящего режима степень передают обратно в шину DC и увеличения напряжения на шине. Как запланировано тормозящий прерыватель ограничивает напряжение на шине DC 700 В. В t = 0,75 с, электромагнитный крутящий момент переходит назад к 0 N.m, и скорость улаживает приблизительно-10 об/мин и уменьшается к 0 об/мин. Заметьте, что поток остается приблизительно 0,8 Вб в течение симуляции. Поток и амплитуды колебания крутящего момента немного выше, чем 0,02 Вб и 10 N.m соответственно, как задано в пользовательском интерфейсе. Это происходит из-за совместного воздействия 15 контроллеров DTC мкс время выборки, гистерезисное управление и переключающееся ограничение частоты.
Интересно визуализировать вращающийся поток, произведенный статором. Для этого используйте блок XY Graph.
Скопируйте блок XY Graph в блоке Signal Selector ac_example.
Соедините осциллограф как показано.
Запустите новую симуляцию.
Этот график показывает результаты симуляции блока XY Graph. Вращающееся поле ясно отображается. Его модуль составляет приблизительно 0,8 Вб, и его полоса пропускания немного больше, чем 0,2 Вб.

