Сгенерируйте модулируемую форму волны трехфазной, двухуровневой ширины импульса
Simscape / Электрический / Управление / Модуляция Ширины импульса
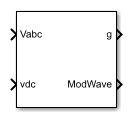
Средства управления блоком PWM Generator (Three-phase, Two-level), переключающие поведение для трехфазного, двухуровневого конвертера степени. Блок:
Вычисляет на - и времена вне пропускания на основе входных параметров блока:
Три синусоидальных ссылочных напряжения, один на фазу
Напряжение ссылки DC
Использует времена пропускания, чтобы сгенерировать шесть управляющих переключателем импульсов.
Использует времена пропускания, чтобы сгенерировать формы волны модуляции.
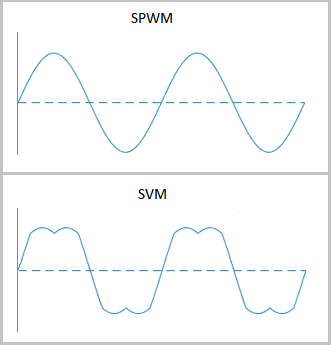
Блок обеспечивает режимы и для непрерывной и для прерывистой модуляции ширины импульса (PWM). Рисунок показывает общее различие между непрерывным синусоидальным PWM (SPWM) и непрерывными формами волны модуляции вектора пробела (SVM).
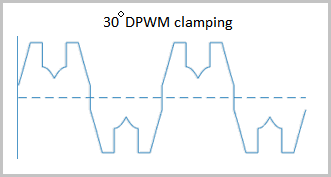
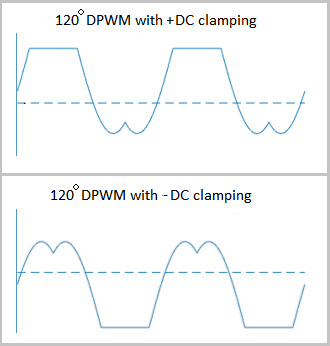
Для прерывистого PWM (DPWM), блок фиксирует волну модуляции к положительной или отрицательной направляющей DC для в общей сложности 120 градусов в каждый основной период. Во время зажимных интервалов прекращается модуляция.
Форма волны с DPWM с 30 степенями имеет четыре интервала с 30 степенями на основной период.
Выбор положительного или отрицательного сдвига фазы с 30 степенями влияет на зажимные интервалы для DPWM с 60 степенями.
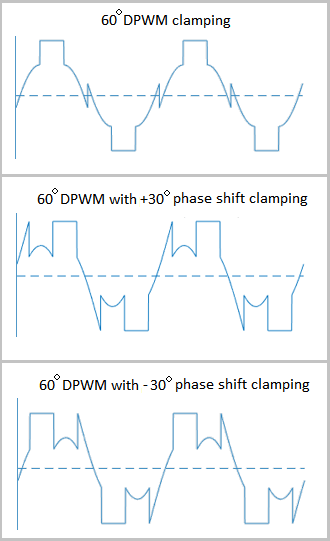
Рисунок показывает формы волны для положительного и отрицательного зажима DC для DPWM с 120 степенями.
Этот блок позволяет вам выбирать естественную, симметричную, или асимметричную выборку волны модуляции.
Блок PWM Generator (Three-phase, Two-level) не выполняет основанный на несущей PWM. Вместо этого блок использует входные сигналы, чтобы вычислить времена пропускания и затем использует времена пропускания, чтобы сгенерировать и управляющие переключателем импульсы и формы волны модуляции, которые он выводит.
Основанный на несущей PWM, однако, полезен для показа, как режим выборки, который вы выбираете, относится к переключателю - на, и выключите поведение импульсов, которые генерирует блок. Генератор, который использует двухуровневый, основанный на несущей метод PWM:
Производит ссылочную волну.
Сравнивает выборку с треугольной несущей.
Генерирует переключатель - на импульсе, если выборка выше, чем сигнал несущей или выключать импульс, если выборка ниже, чем несущая.
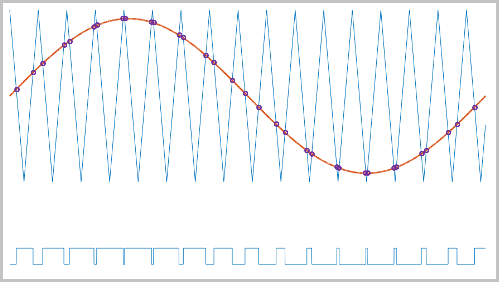
Чтобы определить переключатель - на и выключить импульсное поведение, двухуровневый основанный на несущей генератор PWM использует эти методы, чтобы произвести треугольную волну:
Естественный — выборка и сравнение происходят в точках пересечения волны модуляции и несущей.
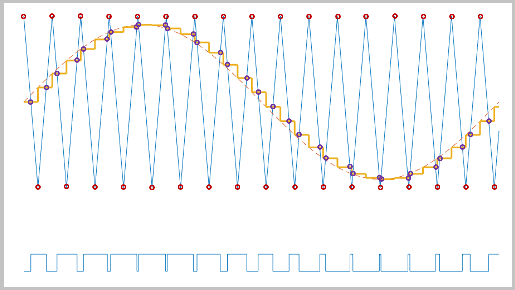
Асимметричный — Выборка происходит на верхних и нижних границах несущей. Сравнение происходит на пересечении, которое следует за выборкой.
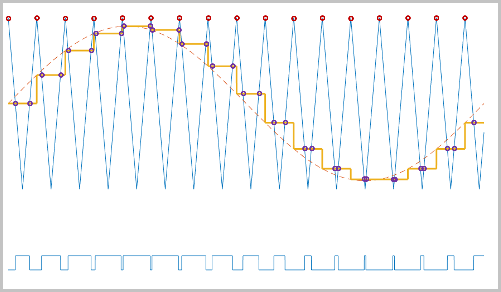
Симметричный — Выборка происходит только на верхнем контуре несущей. Сравнение происходит на пересечении, которое следует за выборкой.
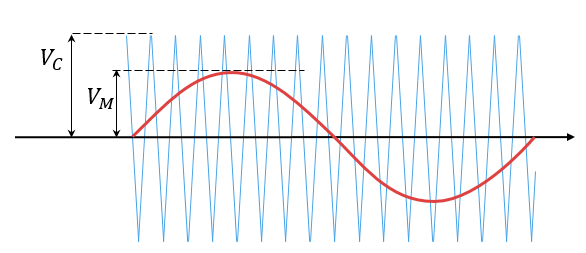
Индекс модуляции, который измеряет способность конвертера степени вывести данное напряжение, задан как
где
m является индексом модуляции.
Vm является пиковым значением волны модуляции.
Vc является пиковым значением треугольной несущей.
Для трехфазного SPWM,
где
Vpeak является пиковым значением основного компонента напряжения фазы-к-нейтральному.
vdc является напряжением ссылки DC.
Для трехфазного вектора пробела PWM (SVM) и DPWM,
Для нормальной установившейся операции, 0 <m ≤ 1. Если переходный процесс, такой как увеличение загрузки, заставляет амплитуду Vm превышать амплитуду Vc, перемодуляция (m> 1) происходит.
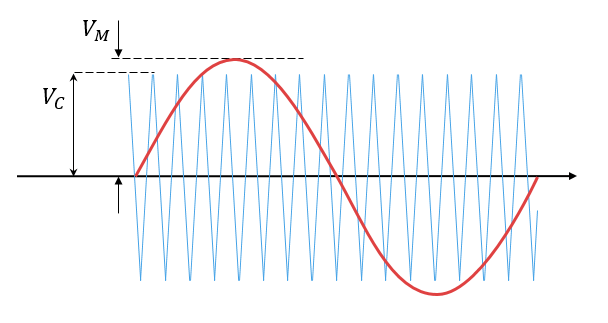
Если перемодуляция происходит, выходное напряжение зажимов конвертера степени к положительной или отрицательной направляющей DC.
В Трехфазном Двухуровневом примере Генератора PWM подсистема Two-Level Controller содержит 400-вольтовый вход ссылки DC, и индекс модуляции, m, 0,8. Для SPWM максимальное входное напряжение составляет 400 В / 2, то есть, 200 В. Чтобы продемонстрировать перемодуляцию, переходный процесс добавляется в начале симуляции. Переходный процесс обеспечивает амплитуды ссылочных напряжений, чтобы превысить амплитуду 1/2 напряжения ссылки DC. Чтобы подсветить перемодуляцию, осциллограф включает результаты симуляции для только одного из шести выходных импульсов и только a - фаза ссылочных напряжений, форм волны модуляции и выходных напряжений.
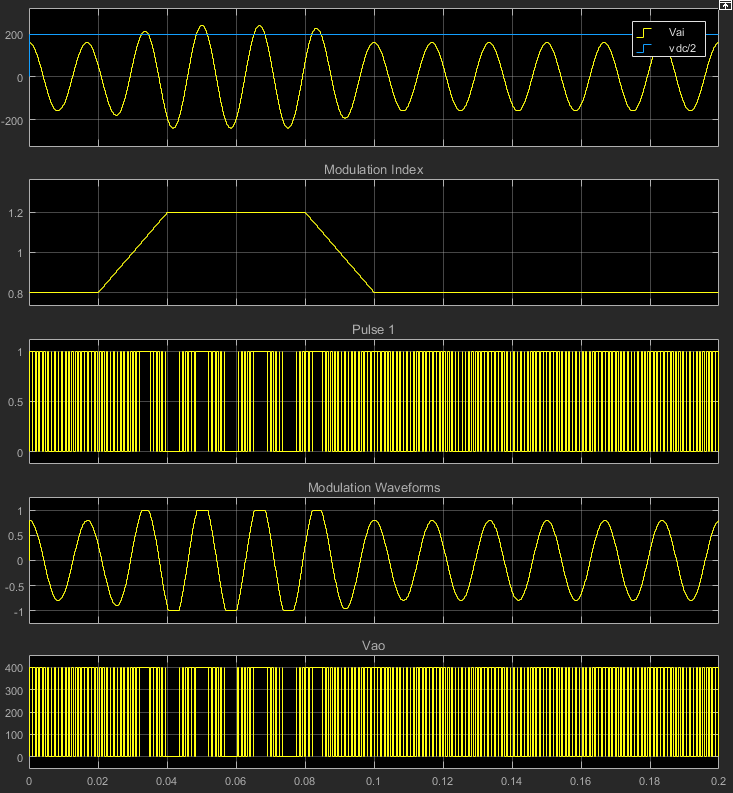
Индекс модуляции больше один между 0.03–0.09 секундами. Во время перемодуляции:
Импульс остается в на или от положения.
Выходное напряжение, Vao, фиксирует к положительной или отрицательной направляющей DC.
[1] Чанг, D. W. Дж. С. Ким и С. К. Сул. “Объединенный Метод Модуляции Напряжения для Оперативного Преобразования Трехфазного питания”. Транзакции IEEE на Промышленных Приложениях, Издании 34, № 2, 1998, стр 374–380.
[2] Hava, утра, Р. Дж. Керкмен и Т. А. Липо. “Простые Аналитические и Графические Методы для Основанных на несущей Дисков PWM-VSI”. Транзакции IEEE на Силовой электронике, Издании 14, № 1, 1999, стр 49–61.

















