Ротационный трансформатор, который измеряет угол вращения
Simscape / Электрический / Sensors & Transducers

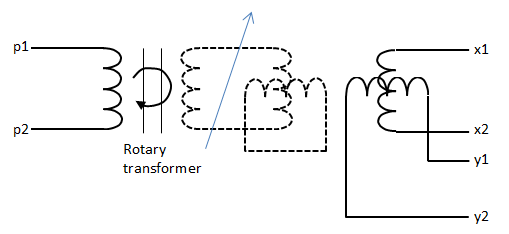
Блок Resolver моделирует типовой преобразователь, который измеряет электрический угол фазы сигнала посредством электромагнитной связи. Преобразователь состоит из ротационного трансформатора, который связывается, напряжение переменного тока применилось к первичной обмотке двум вторичным обмоткам. Эти вторичные обмотки физически ориентированы в 90 градусах друг на друга. Когда угол ротора изменяется, относительная связь между основным устройством и этими двумя вторичными обмотками варьируется. В модели блока Resolver первая вторичная обмотка ориентирована таким образом, что пиковая связь происходит, когда ротор в нулевых степенях, и поэтому вторая вторичная обмотка имеет связь минимума, когда ротор в нулевых степенях.
Без потери общности это принято, что трансформатор между первичным и схемой ротора идеален с отношением 1:1. Это приводит к текущему ротору и напряжение, являющееся эквивалентным первичному току и напряжению.
У вас есть две опции для того, чтобы определить уравнения блока:
Не используйте динамику путем пренебрежения трансформатора индуктивные термины. Эта модель только допустима, если датчик управляется синусоидой, потому что любой компонент DC на первичной стороне передаст выходной стороне.
Включайте индуктивные термины, таким образом, получая амплитудную потерю напряжения и разность фаз. Эта модель допустима для любой входной формы волны. В рамках этой опции можно или задать индуктивность и пиковый коэффициент связи непосредственно, или задать коэффициент трансформации и измеренные импедансы, в этом случае блок использует эти значения, чтобы определить индуктивные термины.
Уравнения основаны на суперпозиции двух идеальных трансформаторов, обоих с коэффициентами связи, которые зависят от угла ротора. Два идеальных трансформатора имеют общую первичную обмотку. Смотрите страницу с описанием блока Simscape™ Ideal Transformer для получения дополнительной информации о моделировании идеальных трансформаторов. Уравнения:
Kx = R, потому что (N Θ)
Ky = sin R (N Θ)
vx = Kx v p
vy = Ky v p
ip = – Kx ix – Ky iy
где:
vp и ip являются ротором (или эквивалентно первичный) напряжение и текущий, соответственно.
vx и ix являются первым вторичным напряжением и текущий, соответственно.
vy и iy являются вторым вторичным напряжением и текущий, соответственно.
Kx является коэффициентом связи для первой вторичной обмотки.
Ky является коэффициентом связи для второй вторичной обмотки.
R является коэффициентом трансформации.
N является количеством пар полюса.
Θ является углом ротора.
Уравнения основаны на суперпозиции двух взаимных индукторов, обоих с коэффициентами связи, которые зависят от угла ротора. Два взаимных индуктора имеют общую первичную обмотку. Смотрите страницу с описанием блока Simscape Mutual Inductor для получения дополнительной информации о моделировании взаимных индукторов. Уравнения:
где:
vp и ip являются ротором (или эквивалентно первичный) напряжение и текущий, соответственно.
vx и ix являются первым вторичным напряжением и текущий, соответственно.
vy и iy являются вторым вторичным напряжением и текущий, соответственно.
Rp является ротором (или первичный) сопротивление.
Lp является ротором (или первичный) индуктивность.
Rs является статором (или вторичный) сопротивление.
Ls является статором (или вторичный) индуктивность.
N является количеством пар полюса.
k является коэффициентом связи.
Θ является углом ротора.
Это принято, что связь между этими двумя вторичными обмотками является нулем.
Таблицы данных обычно не заключают коэффициент в кавычки связи и параметров индуктивности, но вместо этого дают коэффициент трансформации R и измеренные импедансы. Если вы выбираете Specify transformation ratio and measured impedances для параметра Parameterization затем значения, которые вы вводите, используются, чтобы определить значения для коэффициентов уравнения, как задано выше.
Используйте раздел Variables интерфейса блока, чтобы установить приоритет и начальные целевые значения для переменных в блоках до симуляции. Для получения дополнительной информации смотрите Приоритет Набора и Начальную Цель для Переменных в блоках.
Преобразователь не чертит крутящего момента между портами R и C вращательного механического устройства.
Трансформатор между первичным и схемой ротора идеален с отношением 1:1.
Связь между этими двумя вторичными обмотками является нулем.

