Дискретное время или непрерывное время один стабилизатор энергосистемы входа PSS7C
Simscape / Электрический / Управление / Управление SM
Блок SM PSS7C реализует двойной вход стабилизатор энергосистемы (PSS) PSS7C, который обеспечивает угловую устойчивость ротора в синхронной машине (SM) в соответствии с IEEE 421.5-2016[1]. Как правило, вы используете PSS, чтобы улучшить затухание колебаний энергосистемы посредством управления возбуждением.
Можно представлять два различных типов системных стабилизаторов двойной входной мощности с этой той же моделью:
Стабилизатор, который использует электроэнергию и скорость (или частота) сигналы вычислить интеграл ускоряющейся степени. Это заставляет расчетный стабилизатор сигнализировать нечувствительный к механическим изменениям.
Стабилизатор, который использует комбинацию электроэнергии и или скорость или частота. Чтобы достигнуть желаемого формирования сигнала стабилизации, система использует скорость непосредственно, без ведущей фазой компенсации, и добавляет сигнал, который пропорционален электроэнергии.
Можно переключиться между непрерывными и дискретными реализациями блока при помощи параметра Sample time (-1 for inherited). Чтобы сконфигурировать интегратор в течение непрерывного времени, установите свойство Sample time (-1 for inherited) на 0. Чтобы сконфигурировать интегратор в течение дискретного времени, установите свойство Sample time (-1 for inherited) на положительное, ненулевое значение, или на -1 наследовать шаг расчета от восходящего блока.
Эта схема иллюстрирует полную структуру стабилизатора энергосистемы PSS7C:
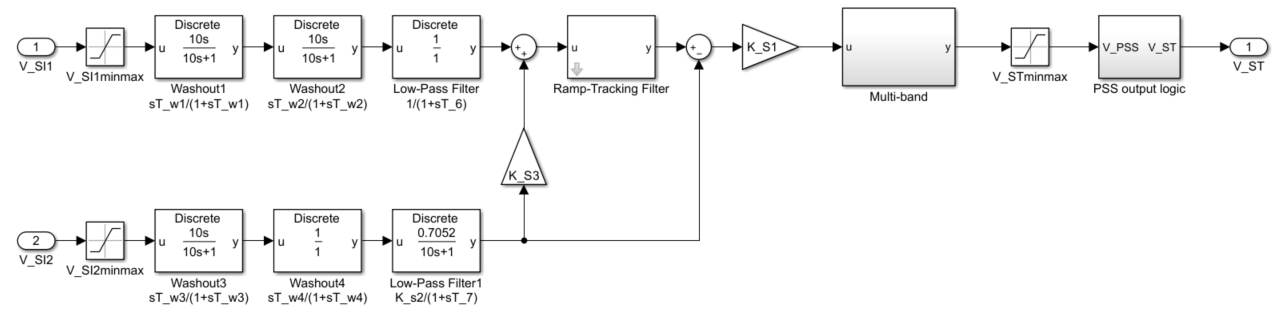
В схеме:
V_SI1 и V_SI2 являются двумя входными параметрами стабилизатора энергосистемы. Обычно используемые входные параметры являются скоростью, частотой или степенью.
Два Размытия (Дискретный или Непрерывный) блоки представлены для каждого входа стабилизатора, с постоянными времени TW1 к TW4, наряду с преобразователем, представленным Фильтром Lowpass (Дискретный или Непрерывный), с постоянными времени T6 и T7.
Чтобы позволить отслеживающую пандус характеристику фильтра, Пандус, Отслеживающий подсистему Фильтра, моделирует сеть ведущей задержки и блоков фильтра lowpass последовательно.
Чтобы предоставить компенсацию фазы, Многополосная подсистема реализует каноническое уравнение состояния, с постоянными времени Ti1 к Ti4 и получает K0 к K4.
PSS подсистема логики выхода позволяет представление PSS логика выхода, сопоставленная с активной мощностью генератора выход. PPSSon и PPSSoff являются пороговыми значениями, используемыми, чтобы задать гистерезис.
[1] Методические рекомендации IEEE для системных моделей возбуждения для исследований устойчивости энергосистемы. Станд. IEEE 421.5-2016. Пискатауэй, NJ: IEEE-SA, 2016.
