Однополюсный, реле двойного броска с задержками и отказами
Simscape / Электрический / Switches & Breakers / Реле

Блок SPDT Relay моделирует однополюсное, реле двойного броска. Блок имеет три потенциальных состояния:
Обесточенный — общий контакт, C, соединяется с обычно замкнутым контактом, S1.
Включенный — общий контакт, C, соединяется с, обычно размыкают контакт, S2.
Разомкнутая цепь — реле открыто. Общий контакт, C, не соединяется с обычно замкнутым контактом, S1, или обычно размыкают контакт, S2.
Вы можете:
Управляйте релейным состоянием с помощью входного порта физического сигнала или электрических портов сохранения.
Выведите релейное состояние.
Задержите повреждение и создание или из или из обе из связей.
Введите поведенческий или временный отказ, который приводит к застрявшей связи, разомкнутой цепи или ухудшенному сопротивлению контакта.
Блок имеет два варианта управления:
Управление физическим сигналом (PS) — состояние реле зависит от того, как значение входного физического сигнала выдерживает сравнение с релейным порогом. Релейный порог, th, является значением, которое вы задаете для параметра Threshold.
Электрическое управление — состояние реле зависит от того, как ток через положительные и отрицательные электрические порты сохранения, которые представляют релейную обмотку, выдерживает сравнение с релейными верхними и более низкими порогами. Верхние и более низкие пороги зависят от значений, которые вы задаете для параметров в настройках Winding.
Поскольку PS управляет вариантом, в начале симуляции:
Если входной сигнал, PS, меньше чем или равен th, реле обесточивается и общий контакт, C, подключения к обычно замкнутому контакту, S1.
Если входной сигнал, PS, больше, чем th, реле включено, и подключения C к обычно размыкают контакт, S2.
После того, как симуляция запускается, если PS повышается выше th, блок идет от обесточенного состояния до энергичного состояния:
C –S1 пропуски связи после задержки задан в Time-to-break C-S1 connection.
C –S2 завершения связи после задержки задан в Time-to-make C-S2 connection.
Если блок идет от энергичного состояния до обесточенного состояния, которое является падениями PS к или ниже th:
C –S2 пропуски связи после задержки задан в Time-to-break C-S2 connection.
C –S1 завершения связи после задержки задан в Time-to-make C-S1 connection.
Для электрического варианта управления верхние и более низкие пороги зависят от заданных значений для Rated voltage, Percent rated voltage to energize, Percent rated voltage to de-energize и параметров Winding series resistance. Номинальный ток:
Уравнение для верхнего текущего порога, ienergized:
Уравнение для более низкого текущего порога, ide-energized:
В начале симуляции:
Если текущее управление меньше ienergized, общего контакта, C, подключений к обычно замкнутому контакту, S1.
Если текущее управление больше ienergized, реле включено, и подключения C к обычно размыкают контакт, S2.
После того, как запуск симуляции, если ток повышается выше ienergized, блок, идет от обесточенного состояния до энергичного состояния:
C –S1 пропуски связи после задержки задан в Time-to-break C-S1 connection.
C –S2 завершения связи после задержки задан в Time-to-make C-S2 connection.
Если ток падает ниже ide-energized, блок идет от энергичного состояния до обесточенного состояния:
C –S2 пропуски связи после задержки задан в Time-to-break C-S2 connection.
C –S1 завершения связи после задержки задан в Time-to-make C-S1 connection.
Чтобы просмотреть релейное состояние, отсоедините порт x, порт физического сигнала, который выводит состояние каждой связи. Чтобы осушить порт x, в настройках Main, устанавливают State port на Visible.
Таблица показывает, как состояние реле относится к состоянию связей. Закрытая связь имеет состояние 1. Открытая связь имеет состояние 0.
Реле и состояния связи
| C –S1 состояние связи | C –S2 состояние связи | Релейное состояние |
|---|---|---|
| 1 | 0 | Обесточенный |
| 0 | 1 | Энергичный |
| 0 | 0 | Разомкнутая цепь |
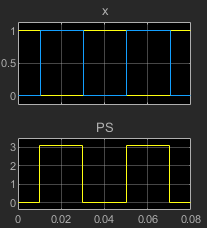
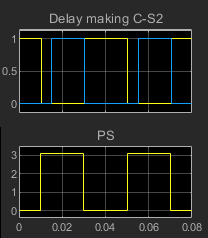
Можно задать задержки того, чтобы сделать и повредить связи в настройках Mechanical. Таблица показывает, как делать и задержки тормоза влияют на связи между контактами S1 и S2 и общий контакт, C.
| Настройки Mechanical | Релейное состояние | C –S1 состояние связи | C –S2 состояние связи | Результаты, с C –S1 в желтом и C –S2 в синем | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Обесточенный | 1 | 0 |
| ||||||||||
| Энергичный | 0 | 1 | ||||||||||||
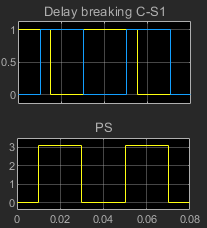
| Обесточенный | 1 | 0 |
| ||||||||||
| Энергичный | 1, 0 | 1 | ||||||||||||
| De-nergized | 0, 1 | 0 |
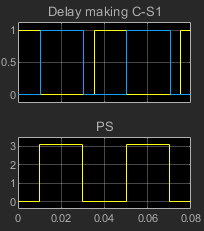
| ||||||||||
| Энергичный | 0 | 1 | ||||||||||||
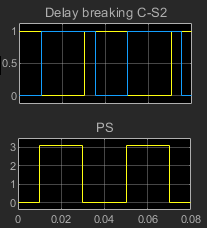
| De-nergized | 1 | 1, 0 |
| ||||||||||
| Энергичный | 0 | 1 | ||||||||||||
| De-nergized | 1 | 0 |
| ||||||||||
| Энергичный | 0 | 0, 1 |
Блок обеспечивает пять типов отказа:
C-S1 stuck closed
C-S2 stuck closed
C open circuit (no path to S1 or S2)
Degraded contact resistance
Winding failed open circuit. Этот тип отказа доступен только для электрического варианта управления.
Каждый тип отказа может вступить в силу только, когда порог для временного или поведенческого триггера превышен.
C –S1 застрявший закрытый отказ происходит, если общий контакт, C, становится механически, электрически, или химически придерживался обычно замкнутого контакта, S1. Причины этого типа отказа включают:
Свяжитесь со сваркой, возможно из-за наплыва текущий или ток отключения, который превышает короткое замыкание оценки или загрузки.
Механическое повреждение.
Ухудшение изоляции.
Индуктивное напряжение.
Таблица показывает неработающее состояние для C –S1 застрявший закрытый отказ.
| Связь | Состояние |
|---|---|
| C –S1 | 1 |
| C –S2 | 0 |
C –S1 застрявший закрылся, временный отказ может произойти, только если время симуляции превышает порог времени, таким образом что
где:
t является временем симуляции.
tth_t является заданным значением для параметра Simulation time after which contactors can stick.
C –S1 застрявший закрылся, поведенческий отказ может произойти, только если текущая загрузка превышает текущий порог сроком на время, которое превышает поведенческий триггерный порог времени. Таким образом, поведенческий отказ может произойти только если:
и
где:
iload является текущей загрузкой.
ith является заданным значением для параметра Maximum permissible load current.
ti>i_th является временем, когда текущий порог превышен.
tth_b является заданным значением для параметра Time to fail when exceeding current.
Когда временные или поведенческие пороги отказа превышены, если C –S1:
Закрытый — C –S1 остается закрытым для остальной части симуляции.
Открытый — C –S1 отказ не вступает в силу, если реле не становится обесточенным и C –S1 завершения связи. После того, как закрытый, C –S1 связь остается закрытым для остальной части симуляции.
C –S2 застрявший закрытый отказ происходит, если общий контакт, C, становится механически, электрически, или химически придерживался обычно замкнутого контакта, S2. Причины этого типа отказа включают:
Свяжитесь со сваркой, возможно из-за наплыва текущий или ток отключения, который превышает короткое замыкание оценки или загрузки.
Механическое повреждение.
Ухудшение изоляции.
Таблица показывает неработающее состояние для C –S2 застрявший закрытый отказ.
| Связь | Состояние |
|---|---|
| C –S1 | 0 |
| C –S2 | 1 |
C –S2 застрявший закрылся, временный отказ может произойти, только если время симуляции превышает порог времени, таким образом что:
где:
t является временем симуляции.
tth_t является заданным значением для параметра Simulation time after which contactors can stick.
C –S2 застрявший закрылся, поведенческий отказ может произойти, только если текущая загрузка превышает текущий порог сроком на время, которое превышает поведенческий триггерный порог времени. Таким образом, поведенческий отказ может произойти только если:
и
где:
iload является текущей загрузкой.
ith является заданным значением для параметра Maximum permissible load current.
ti>i_th является временем, когда текущий порог превышен.
tth_b является заданным значением для параметра Time to fail when exceeding current.
Когда временные или поведенческие пороги отказа превышены, если C –S2:
Закрытый — C –S2 остается закрытым для остальной части симуляции.
Открытый — C –S2 отказ не вступает в силу, если реле не становится энергичным и C –S2 завершения связи. После того, как закрытый, C –S2 связь остается закрытым для остальной части симуляции.
Разомкнутая цепь C (никакой путь к S1 или S2) отказ происходит, если общий контакт, C, становится механически всунутым открытая позиция. Этот тип отказа может произойти если:
Существует повреждение контакта или ухудшение.
Коннектор переключателя становится механически застрявшим посреди реле.
Таблица показывает неработающее состояние для разомкнутой цепи C (никакой путь к S1 или S2) отказ.
| Связь | Состояние |
|---|---|
| C –S1 | 0 |
| C –S2 | 0 |
Временный отказ разомкнутой цепи C может произойти, только если время симуляции превышает порог времени, таким образом что
где:
t является временем симуляции.
tth_t является заданным значением для параметра Simulation time after which C can be open circuit.
Поведенческий отказ разомкнутой цепи C может произойти, только если текущая загрузка превышает текущий порог сроком на время, которое превышает поведенческий триггерный порог времени. Таким образом, поведенческий отказ может произойти только если:
и
где:
iload является текущей загрузкой.
ith является заданным значением для параметра Maximum permissible load current.
ti>i_th является промежутком времени, в течение которого превышен текущий порог.
tth_b является заданным значением для параметра Time to fail when exceeding current.
Когда временный порог отказа превышен, если:
Реле находится в состоянии разомкнутой цепи, то есть, одна связь была повреждена, и другая связь еще не была установлена, реле остается открытым для остальной части симуляции.
Или C –S1 или C –S2 связь закрываются, отказ не вступает в силу, если реле не включено или обесточено, и закрытая связь повреждается. Если связь повреждается, реле становится разомкнутой цепью и остается открытым для остальной части симуляции.
Когда поведенческие пороги отказа превышены, если:
Реле находится в состоянии разомкнутой цепи, то есть, одна связь была повреждена, и другая связь еще не была установлена, реле остается открытым для остальной части симуляции.
Или C –S1 или C –S2 связь закрываются, релейное состояние сразу становится разомкнутой цепью и остается разомкнутая цепь для остальной части симуляции.
Причины ухудшенного отказа сопротивления контакта включают:
Вызванные злоупотреблением условия перегрузки. Высокие токи наплыва и напряжения могут вызвать условия перегрузки, как может чрезмерное переключение реле. Условия перегрузки в конечном счете инициировали электрическое выгибание, которое вырабатывает тепло, которое ухудшает материал контакта.
Химическое загрязнение, которое вмешивается в операцию релейных контактов. Загрязнители, которые могут включать фильмы оксидирования или внешние частицы, имеют тенденцию производить высокие или нестабильные показания сопротивления контакта.
Конец релейной жизни.
Таблица показывает неработающее состояние для ухудшенного отказа сопротивления контакта.
| Связь | Состояние |
|---|---|
| C –S1 | 0 или 1. Сопротивление контакта ухудшается. |
| C –S2 | 0 или 1. Сопротивление контакта ухудшается. |
Временный отказ сопротивления ухудшенного контакта может произойти, только если время симуляции превышает порог времени, таким образом что
где:
t является временем симуляции.
tth_t является заданным значением для параметра Simulation time for fault event.
Ухудшенные сопротивления контакта S1 и S2:
где:
rcontact_fault_s1 является окончательным значением неработающего сопротивления контакта S1.
rcontact_fault_s2 является окончательным значением неработающего сопротивления контакта S2.
rcontact является ненеработающий S1 и сопротивление контакта S2.
Поведенческий отказ сопротивления ухудшенного контакта может произойти, только если текущая загрузка превышает текущий порог сроком на время, которое превышает поведенческий триггерный порог времени. Таким образом, поведенческий отказ может произойти только если:
и
где:
iload является текущей загрузкой.
ith является заданным значением для параметра Maximum permissible load current.
ti1>i_th является промежутком времени, в течение которого текущий порог для связи превышен C-S1.
tth_b является заданным значением для параметра Time to fail when exceeding current.
Для инициированного поведением отказа, если постоянно по временному интервалу tth_b,
где:
iS1-C является общим контактом к обычно замкнутому контакту, C –S1, текущий.
ith является заданным значением для параметра Maximum permissible load current.
tth_b является заданным значением для параметра Time to fail when exceeding current.
rcontact_fault_s1 является окончательным значением неработающего сопротивления контакта S1.
rcontact является ненеработающим сопротивлением контакта S1.
τ является заданным значением для параметра Time constant for degraded contact resistance.
Аналогично, для C –S2 связь, если
и
затем ухудшенное сопротивление контакта:
где:
iS2-C является общим контактом к обычно замкнутому контакту, C –S2, текущий.
rcontact_fault_s2 является окончательным значением неработающего сопротивления контакта S2
Когда временный порог отказа превышен, и для C –S1 и для C –S2 связи, сопротивление контакта сразу ухудшается и остается ухудшенным для остальной части симуляции.
Когда поведенческие пороги отказа превышены для C –S1, в терминах iS1-C, сопротивление для C –S1 связь ухудшается после заданного значения для параметра Time to fail when exceeding current и остается ухудшенным для остальной части симуляции.
Когда поведенческие пороги отказа превышены для C –S2, в терминах iS2-C, сопротивление для C –S2 связь ухудшается после заданного значения для параметра Time to fail when exceeding current и остается ухудшенным для остальной части симуляции.
Отказ обмотки разомкнутой цепи доступен только для электрического варианта управления. Разомкнутая цепь в катушке обмотки может вызвать этот тип отказа.
Таблица показывает, что неработающее состояние для обмотки привело отказ разомкнутой цепи к сбою.
| Связь | Состояние |
|---|---|
| C –S1 | 1 |
| C –S2 | 0 |
Обмотка привела разомкнутую цепь к сбою, временный отказ может произойти, только если время симуляции превышает порог времени, таким образом что
где:
t является временем симуляции.
tth_t является заданным значением для параметра Simulation time for fault event.
Для отказа времени реле переключается в зависимости от текущей обмотки, который аппроксимирован как:
где:
L является извилистой индуктивностью.
R является сопротивлением обмотки.
i является текущей обмоткой.
vwinding является напряжением через обмотку.
tth_t является заданным значением для параметра Simulation time for fault event.
τ является заданным значением для параметра Time constant for winding open circuit transition.
Обмотка привела разомкнутую цепь к сбою, поведенческий отказ может произойти, только если одно из этих условий соблюдают:
Текущая обмотка превышает текущий порог сроком на время, которое превышает поведенческий триггерный порог времени.
Извилистое напряжение превышает порог напряжения для неоднократно, который превышает порог для количества перегрузок напряжения.
Таким образом, поведенческий отказ может произойти только если:
и затем
где:
iwinding является текущей обмоткой.
ith является заданным значением для параметра Maximum permissible winding current.
ti>i_th является временем, когда текущий порог превышен.
tth_b является заданным значением для параметра Time to fail when exceeding current.
или если:
и затем
где:
vwinding является извилистым напряжением.
vth является заданным значением для параметра Maximum permissible winding voltage.
Nv>v_th является числом раз, что порог напряжения превышен.
Nth является заданным значением для параметра Number of events to fail when exceeding voltage.
Если временные или поведенческие пороги отказа превышены, C –S1 остается закрытым для остальной части симуляции
Для поведенческих отказов, если порог time to fail when exceeding the current больше времени между переключающимися событиями, не инициирован никакой отказ, потому что накопленное тепло не достаточно для расплавления или повреждения контактов или обмоток.
Подавание питание и обесточивает задержки, может отличаться, но подавать питание задержка должна быть больше или быть равна обесточивать задержке.
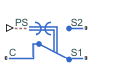
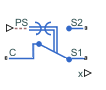
Тип, видимость и местоположение портов блока зависят от того, как вы конфигурируете эти параметры в настройках Main:
Control port — Выберите между входным портом физического сигнала, PS, или электрическими портами сохранения, + и -, для релейного управления.
State port — Установите видимость для релейного выходного порта физического сигнала состояния, x.
Common port — Установите местоположение общего порта, C, относительно портов S1 и S2 контакта.
| Control port | State port | Common port | Блок |
|---|---|---|---|
PS | Hidden | Adjacent to switch ports |
|
Adjacent to switch ports |
| ||
Visible | Across from switch ports |
| |
Across from switch ports |
| ||
Electrical | Hidden | Не применяется |
|
Visible | Не применяется |
|