Шестифазовая синхронная машина
Simscape / Электрический / Электромеханический / Синхронный
Блок Synchronous Machine (Six-Phase) моделирует шестифазовую синхронную машину, также известную как двойную звездообразную машину.
Шестифазовая синхронная машина имеет две группы обмоток статора: группа ABC и группа XYZ. У этих двух групп есть 30 сдвигов фазы степени.
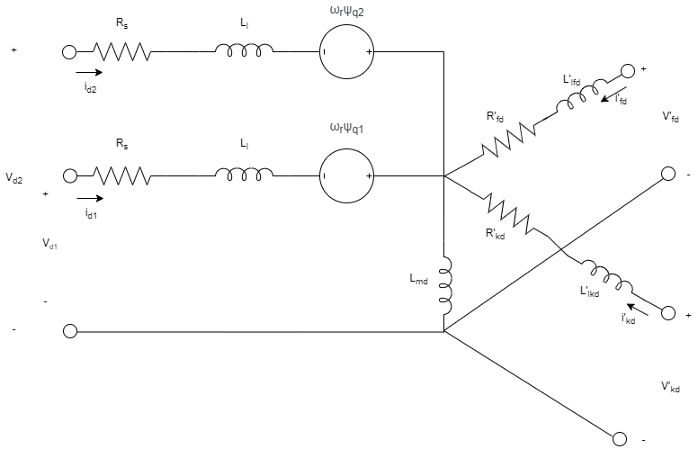
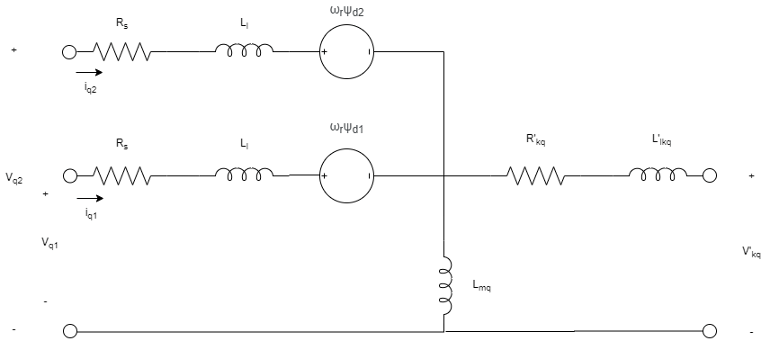
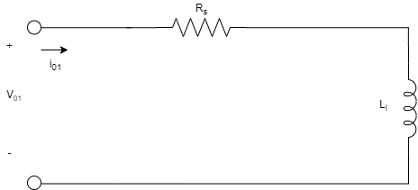
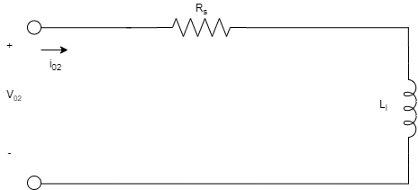
Эквивалентные схемы шестифазовой синхронной машины для прямой оси, квадратурной оси и двух нулевых последовательностей:
Синхронные уравнения машины описываются относительно синхронно вращающейся системы координат, заданной:
где:
θe является ротором электрический угол.
N является количеством пар полюса.
θr является углом механического устройства ротора.
x_rotor_offset является 0 если вы задаете ротор электрический угол относительно d - ось или -pi/2 если вы задаете ротор электрический угол относительно q - ось.
Два преобразования Парка сопоставляют синхронные уравнения машины с вращающейся системой координат относительно электрического угла. Преобразование Парка для первой группы обмоток статора, группы ABC, задано:
Преобразование Парка для второй группы обмоток статора, группы XYZ, задано:
Преобразования Парка используются, чтобы определить синхронные уравнения машины на модуль.
Уравнения напряжения статора для группы ABC определены:
где:
vd1, vq1 и v01 является d - ось, q - ось и нулевая последовательность напряжения статора ABC, заданные:
va, vb и vc являются напряжениями статора ABC, измеренными от порта ~ABC до нейтрального порта n1.
ωbase является основной электрической скоростью на модуль.
ψd1, ψq1 и ψ01 является d - ось, q - ось и потокосцепления статора нулевой последовательности для группы ABC.
ωr является скоростью вращения ротора на модуль.
Rs является сопротивлением статора.
id1, iq1 и i01 является d - ось, q - ось и нулевая последовательность токи статора ABC, заданные:
ia, ib и ic являются токами статора ABC, текущими из порта ~ABC к порту n1.
Уравнения напряжения статора для группы XYZ определены:
где:
vd2, vq2 и v02 является d - ось, q - ось и нулевая последовательность напряжения статора XYZ, заданные:
vx, vy и vz являются напряжениями статора XYZ, измеренными от порта ~XYZ до нейтрального порта n2.
ψd2, ψq2 и ψ02 является d - ось, q - ось и потокосцепления статора нулевой последовательности для группы XYZ.
id2, iq2 и i02 является d - ось, q - ось и нулевая последовательность токи статора XYZ, заданные:
ix, iy и iz являются токами статора XYZ, текущими из порта ~XYZ к порту n2.
Уравнения напряжения ротора определены:
где:
v'fd является напряжением обмотки возбуждения, упомянул сторону статора.
v'kd и v'kq является dq - демпфер осей, извилистые напряжения упомянули сторону статора. Они все равны 0.
ψ'fd, ψ'kd и ψ'kq являются магнитными потоками, соединяющими цепь возбуждения, d - обмоткой демпфера оси, и q - обмотка демпфера оси.
R'fd, R'kd и R'kq являются сопротивлениями цепи возбуждения ротора, d - обмоткой демпфера оси, и q - обмотка демпфера оси.
i'fd, i'kd и i'kq являются полем и dq - демпфер осей, извилистые токи упомянули сторону статора.
Уравнения потокосцепления статора определены:
где:
Ll является индуктивностью утечки статора.
Lmd и Lmq являются взаимной индуктивностью статора d - осью и q - ось.
Уравнения потокосцепления ротора определены:
где:
L'lfd является индуктивностью обмотки возбуждения ротора.
L'lkd является ротором d - демпфер оси извилистая индуктивность.
L'lkg является ротором q - демпфер оси извилистая индуктивность.
Крутящий момент ротора задан:
Блок обеспечивает два варианта моделирования. Чтобы выбрать желаемый вариант, щелкните правой кнопкой по блоку по своей модели. Из контекстного меню выберите Simscape> Block choices, и затем один из этих вариантов:
No thermal port — Блок содержит электрические порты сохранения, сопоставленные с обмотками статора, но не содержит тепловые порты.
Show thermal port — Блок содержит электрические порты сохранения, сопоставленные с обмотками статора и семью тепловыми портами сохранения, один для каждой из этих шести обмоток и один для ротора.
Используйте тепловые порты, чтобы симулировать эффекты медного сопротивления, которые преобразовывают электроэнергию в теплоту. Для получения дополнительной информации об использовании тепловых портов в блоках привода смотрите Термальные эффекты Симуляции во Вращательных и Поступательных Приводах.
Выбор теплового варианта блока отсоединяет тепловые параметры.
Настройки Variables позволяют вам задавать приоритет и начальные целевые значения для переменных в блоках перед симуляцией. Для получения дополнительной информации смотрите Приоритет Набора и Начальную Цель для Переменных в блоках.
Для этого блока отображаются настройки Variables, только если в настройках Initial Conditions параметр Initialization option устанавливается на Set targets for rotor angle and Park's transform variables.
[1] Киферндорф, F., Burzanowska, H., Канерва С., Сарио П. "Моделирование основанных на роторе гармоник в двойной звезде, ранил поле, синхронные машины". 2 008 18-х Международных конференций по вопросам Электрических Машин: Виламура, 1-6.
[2] Burzanowska, H., Sario P, Сталз К., Джоерг П. "Избыточный Диск с Прямым управлением крутящим моментом (DTC) и двойная звездообразная синхронная машина, симуляции и верификации". 2 007 европейских Конференций по Силовой электронике и Приложениям: Ольборг, 1-10.
Synchronous Machine Field Circuit | Synchronous Machine Measurement | Synchronous Machine Model 1.0 | Synchronous Machine Model 2.1 | Synchronous Machine Salient Pole | Synchronous Machine Round Rotor
