Поведенческая модель управляемого напряжением генератора
Simscape / Электрический / Интегральные схемы
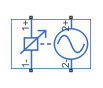
Блок Voltage-Controlled Oscillator обеспечивает поведенческую модель управляемого напряжением генератора (VCO). Выходное напряжение задано следующими уравнениями:
где:
v в является напряжением, примененным через 1 + и 1– портов.
v является напряжением через 2 + и 2– портов.
Имя f является частотой генератора, когда напряжение элемента управления вводом является именем v.
F является линейной функцией v lim или функции интерполяционной таблицы v lim.
A является амплитудой пика выходного напряжения.
t является временем симуляции.
i является текущий выход.
R является выходным сопротивлением.
Если вы выбираете Linear для параметра Frequency dependence on input voltage затем функциональным F дают:
где k является скоростью изменения частоты с входным напряжением.
Если вы выбираете Tabulated для параметра Frequency dependence on input voltage затем функциональный F задан векторами из входных напряжений и соответствующих выходных отклонений частоты от номинала, который вы предоставляете. Значения в течение min v и v макс. являются первыми и последние значения вектора входного напряжения.
Можно смоделировать задержку между изменением в напряжении элемента управления вводом и частотой генератора. Сделайте это путем моделирования первого порядка, динамического между v lim и значением, передало функциональному F.

