Обратное рассеяние сигнализирует от пешехода
Radar Toolbox
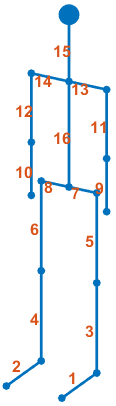
Блок Backscatter Pedestrian моделирует моностатическое отражение неполяризованных электромагнитных сигналов от идущего пешехода. Модель обхода пешехода координирует движение 16 сегментов тела симулировать естественное движение. Модель также симулирует радарную отражающую способность каждого сегмента тела. Из этой модели можно получить положение и скорость каждого сегмента и общего количества backscattered излучение, когда тело перемещается.
Индексы сегмента тела задают, какие столбцы в X, Ang, BPPOS и портах BPVEL содержат данные для определенного сегмента тела. Индексы сегмента тела задают, какая страница в порте Ax содержит данные для определенного тела сегменты. Например, столбец 3 X содержит выборочные данные для левой голени. Столбец 3 Ang содержит угол падения сигнала в левой голени.
| Сегмент тела | Индекс | |
|---|---|---|
| Левая нога | 1 |
|
| Правая нога | 2 | |
| Оставленная голень | 3 | |
| Правая голень | 4 | |
| Оставленное бедро | 5 | |
| Правое бедро | 6 | |
| Оставленное бедро | 7 | |
| Правое бедро | 8 | |
| Оставленное предплечье | 9 | |
| Правое предплечье | 10 | |
| Оставленное плечо | 11 | |
| Правое плечо | 12 | |
| Оставленное плечо | 13 | |
| Правое плечо | 14 | |
| Голова | 15 | |
| Туловище | 16 | |