Непрерывная модель объекта управления использует данные сигнала, который является гладким и непрерывен вовремя. Существуют данные сигнала для каждой временной стоимости. Непрерывная модель объекта управления использует непрерывный решатель (любой решатель кроме явного дискретного решателя). Решатель может быть фиксированным шагом или переменной. Модель включает блоки из библиотеки Continuous в Simulink®, такой как блок Integrator.
Чтобы загрузить данные, чтобы представлять непрерывный объект, рассмотрите использование или входного порта корневого уровня или блока From Workspace. Используя From Workspace блок может быть полезным при загрузке данных к порту, проложенному под землей глубоко в модели.
Для данных сигнала:
Задайте временной вектор и значения сигналов, извлеченные из непрерывного объекта. Например, извлеките из данных, которые вы получаете экспериментально или из результатов предыдущей симуляции.
Используйте любой из форматов данных, перечисленных в, Задают Входные данные. Здесь рекомендуются форматы для следующих импортированных источников данных:
Другая симуляция — Dataset
Уравнение — MATLAB® выражение времени
Экспериментальные данные — MATLAB timeseries, структура со временем, структура без времени или массив данных
Для данных о структуре смотрите, Задают Данные Времени.
Этот пример иллюстрирует, как использовать записанные данные от симуляции одной модели в симуляции второй модели. Для получения дополнительной информации смотрите, что Данные о Загрузке Вошли в систему Другая Симуляция.
При использовании данных из симуляции, которая использует решатель переменного шага для симуляции в другой модели, вторая симуляция должна считать данные, одновременно продвигается как первая симуляция.
Откройте ex_data_import_continuous модель.
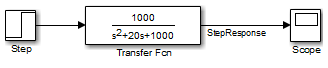
Эта модель использует ode15s решатель и производит непрерывные сигналы.
Чтобы использовать выход этой модели, как введено к симуляции другой модели, регистрируйте сигнал, что вы хотите использовать. В Редакторе Simulink выберите тот сигнал и нажмите Log Signals.
Примечание
Чтобы включить логгирование сигнала, выберите Configuration Parameters> Data Import/Export> параметр Signal logging. Этой модели включили Signal logging.
Симулируйте модель.
Симуляция модели сохраняет регистрируемый сигнал в рабочую область в Simulink.SimulationData.Dataset объект, logsout.
Используйте Simulink.SimulationData.Dataset.getElement метод, чтобы получить доступ к записанным данным. Записанные данные для отдельного сигнала хранятся в a Simulink.SimulationData.SignalDataset объект, созданный этой моделью, содержит ту регистрируемый сигнал: StepResponse.
Откройте вторую модель, ex_data_import_continuous_second.

Можно сконфигурировать эту вторую модель, чтобы симулировать использование записанных данных из первой модели. В этом примере вторая модель использует блок Inport корневого уровня, чтобы загрузить записанные данные, как введено для симуляции. Блоку Inport выбрали опцию Interpolate data.
Во второй модели выберите Configuration Parameters> Data Import/Export> параметр Input.
Используйте Simulink.SimulationData.Signal.getElement метод, чтобы задать StepResponse элемент сигнала:

Укажите, что для второй модели, запуски решателя Simulink в то время, когда шаги задали в сохраненных данных (u). В панели Импорта/Экспорта Данных, установленной параметр Output options на Produce additional output и параметр Output times к:
logsout.getElement('StepResponse').Values.TimeСимулируйте вторую модель.
Примечание
Simulink не питает незначительные данные о временном шаге через корневые входные порты. Для получения дополнительной информации о незначительных временных шагах, смотрите Типы Шага расчета.
