Робертсон [1] создал систему автокаталитических химических реакций протестировать и сравнить числовые решатели для жестких систем. Реакции, константы скорости (k), и скорости реакции (V) для системы даны можно следующим образом:
Поскольку существуют значительные различия между скоростями реакции, числовые решатели рассматривают дифференциальные уравнения как жесткие. Для жестких дифференциальных уравнений некоторые числовые решатели не могут сходиться на решении, если размер шага чрезвычайно не мал. Если размер шага чрезвычайно мал, время симуляции может быть неприемлемо длинным. В этом случае необходимо использовать числовой решатель, спроектированный, чтобы решить жесткие уравнения.
Система обыкновенных дифференциальных уравнений (ODE) имеет следующие характеристики:
Все уравнения являются обыкновенными дифференциальными уравнениями.
Каждое уравнение является производной зависимой переменной относительно одной независимой переменной, обычно время.
Количество уравнений равно количеству зависимых переменных в системе.
Используя скорости реакции, можно создать набор дифференциальных уравнений, описывающих скорость изменения каждой химической разновидности. С тех пор существует три разновидности, в математической модели существует три дифференциальных уравнения.
Начальные условия: , , и .
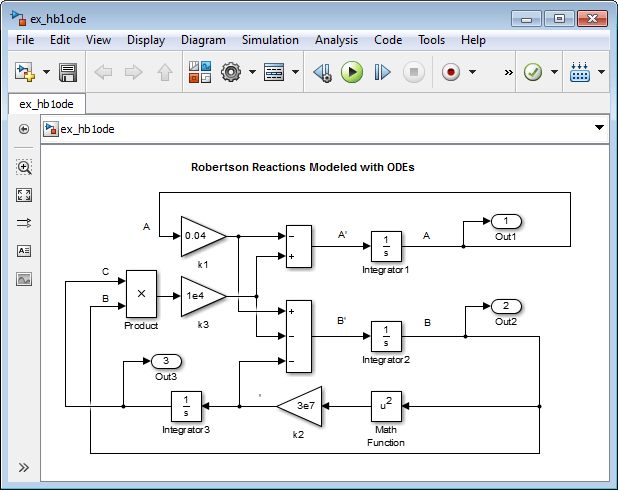
Создайте модель или откройте модель ex_hb1ode.
Добавьте три блока Интегратора в свою модель. Пометьте входные параметры A'B, и C', и выходные параметры AB, и C соответственно.
Добавьте Сумму, продукт и блоки Усиления, чтобы решить каждую дифференциальную переменную. Например, чтобы смоделировать C' сигнала,
Добавьте блок Math Function и соедините вход, чтобы сигнализировать о B. Установите the Function параметр на square.
Соедините выход от блока Math Function до блока Gain. Установите параметр Gain на 3e7.
Продолжите добавлять остающиеся термины дифференциального уравнения в свою модель.
Смоделируйте начальное условие A путем установки параметра Initial condition для A Блок Integrator к 1.
Добавьте блоки, чтобы сохранить сигналы AB, и C к переменной MATLAB yout.
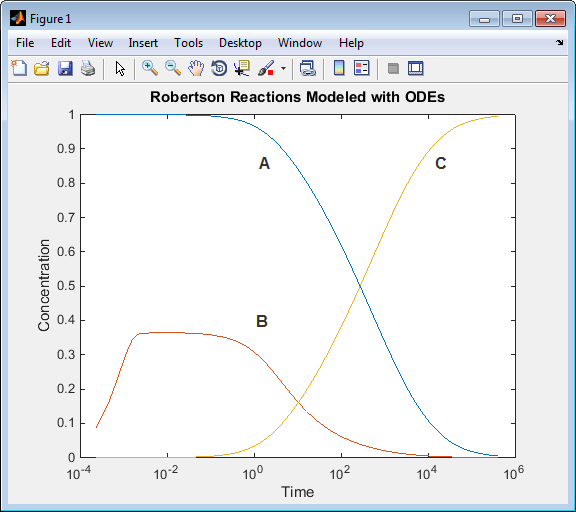
Создайте скрипт, который использует sim команда, чтобы симулировать вашу модель. Этот скрипт сохраняет результаты симуляции в переменной MATLAB yout. Поскольку симуляция имеет долговременный интервал и B первоначально изменения очень быстро, графический вывод значений на логарифмическом масштабе помогает визуально сравнить результаты. Кроме того, начиная со значения B мал относительно значений A и C, умножьте B прежде, чем построить значения.
Введите следующие операторы в MATLAB® скрипт. Если вы создали свою собственную модель, замена ex_hblode с именем вашей модели.
sim('ex_hb1ode')
yout(:,2) = 1e4*yout(:,2);
figure;
semilogx(tout,yout);
xlabel('Time');
ylabel('Concentration');
title('Robertson Reactions Modeled with ODEs')От Simulink® Редактор, на вкладке Modeling, нажимает Model Settings.
— В панели Решателя, набор Stop time к 4e5 и the Solver к ode15s (stiff/NDF).
— В панели Импорта Данных установите флажки Time и Output.
Запустите скрипт. Заметьте что весь A преобразован в C.
Система дифференциальных алгебраических уравнений (DAE) имеет следующие характеристики:
Это содержит оба обыкновенных дифференциальных уравнения и алгебраические уравнения. Алгебраические уравнения не имеют никаких производных.
Только некоторые уравнения являются дифференциальными уравнениями, задающими производные некоторых зависимых переменных. Другие зависимые переменные заданы алгебраическими уравнениями.
Количество уравнений равно количеству зависимых переменных в системе.
Некоторые системы содержат ограничения из-за законов сохранения, таких как сохранение массы и энергии. Если вы устанавливаете начальные концентрации на, , и , общая концентрация трех разновидностей всегда равна с тех пор . Можно заменить дифференциальное уравнение для следующим алгебраическим уравнением, чтобы создать набор дифференциальных алгебраических уравнений (ДАУ).
Дифференциальные переменные A и B исключительно определите алгебраическую переменную C.
Начальные условия: и .
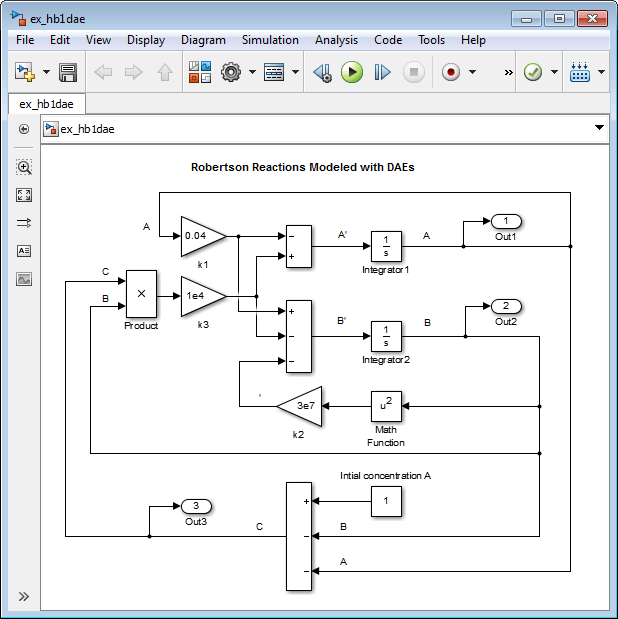
Внесите эти изменения в свою модель или в модель ex_hb1ode, или откройте модель ex_hb1dae.
Удалите блок Integrator для вычисления C.
Добавьте блок Sum и установите параметр List of signs на + –.
Соедините сигналы A и B к минус входные параметры блока Sum.
Смоделируйте начальную концентрацию A с блоком Constant, соединенным с плюс вход блока Sum. Установите параметр Constant value to 1.
Соедините выход блока Sum к разветвленному трубопроводу, соединенному с продуктом, и блокируется.
Создайте скрипт, который использует sim команда, чтобы симулировать вашу модель.
Введите следующие операторы в скрипт MATLAB. Если вы создали свою собственную модель, замена ex_hbldae с именем вашей модели.
sim('ex_hb1dae')
yout(:,2) = 1e4*yout(:,2);
figure;
semilogx(tout,yout);
xlabel('Time');
ylabel('Concentration');
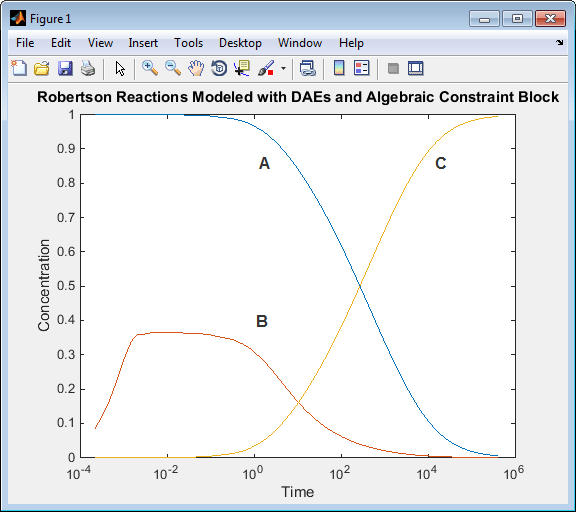
title('Robertson Reactions Modeled with DAEs')Из Редактора Simulink, на вкладке Modeling, нажимают Model Settings.
— В панели Решателя, набор Stop time к 4e5 и the Solver к ode15s (stiff/NDF).
— В панели Импорта Данных установите флажки Time и Output.
Запустите скрипт. Результаты симуляции, когда вы используете алгебраическое уравнение, эквивалентны для симуляции модели с помощью только дифференциальные уравнения.

Некоторые системы содержат ограничения из-за законов сохранения, таких как сохранение массы и энергии. Если вы устанавливаете начальные концентрации на, , и , общая концентрация трех разновидностей всегда равна с тех пор .
Можно заменить дифференциальное уравнение для алгебраическим уравнением, смоделированным с помощью блока Algebraic Constraint и блока Sum. Блок Algebraic Constraint ограничивает свой входной сигнал F (z) обнулять и выводит алгебраическое состояние z. Другими словами, блок выход является значением, должен был произвести нуль во входе. Используйте следующее алгебраическое уравнение для входа с блоком.
Дифференциальные переменные A и B исключительно определите алгебраическую переменную C.
Начальные условия: , , и .
Внесите эти изменения в свою модель или в модель ex_hb1ode, или откройте модель ex_hb1dae_acb.
Удалите блок Integrator для вычисления C.
Добавьте блок Algebraic Constraint. Установите параметр Initial guess на 1e-3.
Добавьте блок Sum. Установите параметр List of signs на – +++.
Соедините сигналы A и B к плюс входные параметры блока Sum.
Смоделируйте начальную концентрацию A с блоком Constant, соединенным с минус вход блока Sum. Установите параметр Constant value на 1.
Соедините выход блока Algebraic Constraint к разветвленному трубопроводу, соединенному с продуктом и входными параметрами блока Out.
Создайте ответвление из выхода блока Algebraic Constraint к финалу плюс вход блока Sum.

Создайте скрипт, который использует sim команда, чтобы симулировать вашу модель.
Введите следующие операторы в скрипт MATLAB. Если вы создали свою собственную модель, замена ex_hbl_acb с именем вашей модели.
sim('ex_hb1dae_acb')
yout(:,2) = 1e4*yout(:,2);
figure;
semilogx(tout,yout);
xlabel('Time');
ylabel('Concentration');
title('Robertson Reactions Modeled with DAEs and Algebraic Constraint Block')Из Редактора Simulink, на вкладке Modeling, нажимают Model Settings.
— В панели Решателя, набор Stop time к 4e5 и the Solver к ode15s (stiff/NDF).
— В панели Импорта Данных установите флажки Time и Output.
Запустите скрипт. Результаты симуляции, когда вы используете блок Algebraic Constraint, эквивалентны для симуляции модели с помощью только дифференциальные уравнения.
Используя Algebraic Constraint блок создает алгебраический цикл в модели, Если вы устанавливаете параметр Algebraic Loop на warning (на вкладке Modeling нажмите Model Settings, затем выберите Diagnostics), следующие индикаторы сообщения в Диагностическом Средстве просмотра в процессе моделирования.
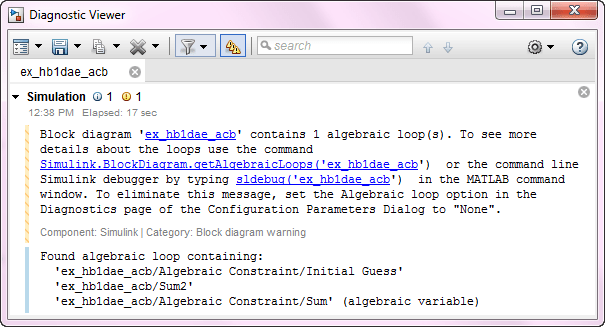
Для этой модели алгебраический решатель цикла смог найти решение для симуляции, но алгебраические циклы не всегда имеют решение, и они не поддерживаются для генерации кода. Для получения дополнительной информации об алгебраических циклах в моделях Simulink и как удалить их, смотрите Алгебраические Концепции Цикла.
[1] Робертсон, H. H. “Решение набора уравнений скорости реакции”. Числовой Анализ: Введение (редактор Дж. Уолша). Лондон, Нажатие England:Academic, 1966, стр 178–182.
