Чтобы использовать автонастройку ПИД-регулятора, сконфигурируйте и разверните один из блоков автотюнера ПИДа, Closed-Loop PID Autotuner или Open-Loop PID Autotuner.
Блоки автотюнера ПИДа работают путем выполнения эксперимента оценки частотной характеристики. Блоки вводят тестовые сигналы в ваш объект и коэффициенты ПИД мелодии на основе предполагаемой частотной характеристики.
Следующая принципиальная схема обычно иллюстрирует, как блок автотюнера ПИДа помещается в систему управления.
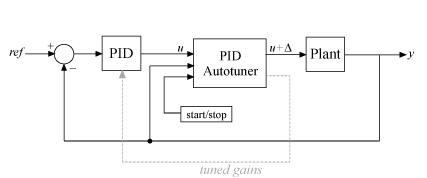
Пока процесс автоматической настройки не начинается, реле блокировки автотюнера управляющий сигнал непосредственно от u до входа объекта в u+Δu. В том состоянии модуль не оказывает влияния на эффективность вашей системы.
Когда процесс автоматической настройки начинается, блок вводит тестовый сигнал в u out собрать данные ввода - вывода объекта и оценить частотную характеристику в режиме реального времени.
Если вы используете блок Open-Loop PID Autotuner, блок открывает обратную связь между u и u+Δu на время эксперимента оценки. Это вводит в u+Δu суперпозицию синусоидальных сигналов на частотах [1/3, 1, 3, 10] ωc, где ωc является вашей заданной целевой полосой пропускания для настройки. Для неинтеграции объектов блок может также ввести сигнал шага оценить усиление DC объекта. Все тестовые сигналы введены сверху номинального входа объекта, который является значением сигнала в u, когда эксперимент начинается.
Если вы используете блок Closed-Loop PID Autotuner, объект остается под управлением ПИД-регулятора с его текущими усилениями во время эксперимента. Настройка с обратной связью использует синусоидальные тестовые сигналы на частотах [1/10,1/3, 1, 3, 10] ωc.
Когда эксперимент заканчивается, блок использует предполагаемую частотную характеристику, чтобы вычислить коэффициенты ПИД. Настраивающийся алгоритм стремится балансировать эффективность и робастность при достижении полосы пропускания управления и запаса по фазе, который вы задаете. Можно сконфигурировать логику, чтобы передать настроенные усиления с блока на ПИД-регулятор, позволив вам подтвердить эффективность с обратной связью в режиме реального времени.
Следующие шаги предоставляют общий обзор рабочего процесса для автонастройки ПИД-регулятора.
Включите блок автотюнера ПИДа в свою систему, как показано в принципиальной схеме.
Сконфигурируйте запустить/остановить сигнал, который управляет, когда настраивающийся эксперимент начинается и заканчивается. Можно использовать этот сигнал инициировать процесс автонастройки ПИД-регулятора в любое время. Когда вы останавливаете эксперимент, блок возвращает настроенные коэффициенты ПИД.
Задайте параметры контроллера, такие как тип контроллера и целевая полоса пропускания для настройки.
Сконфигурируйте параметры эксперимента, такие как амплитуды возмущений, введенных во время эксперимента частотной характеристики.
Запустите процесс автоматической настройки с помощью запустить/остановить сигнала и позвольте ему запускаться достаточно долго, чтобы завершить эксперимент оценки частотной характеристики.
Остановите процесс автоматической настройки. Когда эксперимент останавливается, автотюнер вычисляет и возвращает настроенные коэффициенты ПИД.
Передайте настроенные усиления с блока на ваш ПИД-регулятор. Можно затем подтвердить эффективность настроенного контроллера в Simulink® или в режиме реального времени.
Для получения дальнейшей информации при выполнении каждого из этих шагов, см.:
Closed-Loop PID Autotuner | Open-Loop PID Autotuner
