Автоматически настройте коэффициенты ПИД на основе частотных характеристик объекта, оцененных из эксперимента с обратной связью в режиме реального времени
Simulink Control Design
Блок Closed-Loop PID Autotuner позволяет вам настроить ПИД-регулятор в режиме реального времени против физического объекта, для которого у вас есть начальный ПИД-регулятор, который дает к устойчивому циклу. Объект остается под управлением с обратной связью начального ПИД-регулятора во время целого процесса автоматической настройки. Блок может настроить ПИД-регулятор, чтобы достигнуть заданной полосы пропускания и запаса по фазе без параметрической модели объекта управления. Если у вас есть продукт генерации кода, такой как Simulink® Coder™, можно сгенерировать код, который реализует настраивающийся алгоритм на оборудовании, позволяя вам настроиться в реальное время с или не используя Simulink, чтобы справиться с процессом автоматической настройки.
Если вам смоделировали объект в Simulink и начальном ПИД-регуляторе, можно выполнить автонастройку ПИД-регулятора с обратной связью против смоделированного объекта. Выполнение так позволяет вам ответ объекта предварительного просмотра, и настройте настройки для автонастройки ПИД-регулятора прежде, чем настроить контроллер в режиме реального времени.
Достигнуть настройки без моделей, блока Closed-Loop PID Autotuner:
Вводит тестовый сигнал в объект, чтобы собрать данные ввода - вывода объекта и оценить частотную характеристику в режиме реального времени. Тестовый сигнал является комбинацией синусоидальных сигналов возмущения, добавленных сверху входа объекта.
В конце эксперимента, параметров ПИД-регулятора мелодий на основе предполагаемых частотных характеристик объекта около целевой полосы пропускания.
Обновляет блок PID Controller или пользовательский ПИД-регулятор настроенными параметрами, позволяя вам подтвердить эффективность с обратной связью в режиме реального времени.
В отличие от этого, с блоком Open-Loop PID Autotuner, цикл остается закрытым в течение эксперимента. Хранение замкнутого круга помогает обеспечить безопасную работу объекта во время эксперимента оценки.
Можно использовать блок Closed-Loop PID Autotuner, чтобы настроить ПИД-регуляторы для:
Любой устойчивый объект
Любой объект непрерывного времени с одним или несколькими интеграторами (орудует шестами в s = 0), или одна или несколько пар комплексных полюсов на мнимой оси
Любой объект дискретного времени с одним или несколькими интеграторами (орудует шестами в z = –1), или пары комплексных полюсов на модульном круге |z | = 1
Если у вас нет начального ПИД-регулятора, можно использовать блок Open-Loop PID Autotuner, чтобы получить тот. Можно затем переключиться на автонастройку ПИД-регулятора с обратной связью для улучшения или перенастройки.
Блок поддерживает генерацию кода с Simulink Coder, Embedded Coder®, и Simulink PLC Coder™. Это не поддерживает генерацию кода с HDL Coder™.
Для получения дополнительной информации об использовании блока Closed-Loop PID Autotuner см.:
Для более общей информации об автонастройке ПИД-регулятора и сравнении подходов и разомкнутого контура с обратной связью, смотрите, Когда Использовать Автонастройку ПИД-регулятора.
u+Δu — Сигнал для объекта вводитсяВставьте блок в свою систему, таким образом, что этот порт кормит входным сигналом ваш объект.
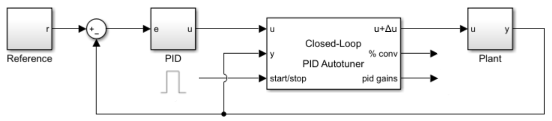
Когда эксперимент запускается (start/stop положительный), блок вводит тестовые сигналы в объект в этом порте. Если вы имеете насыщение или ограничение скорости, защищающее объект, питаете сигнал от u+Δu в него.
Когда эксперимент не запускается (start/stop нуль или отрицательный), блок передает сигналы, неизменные от u до u+Δu.
Чтобы включить этот порт, в Output Signal Configuration, выбирают control + perturbation.
Типы данных: single | double
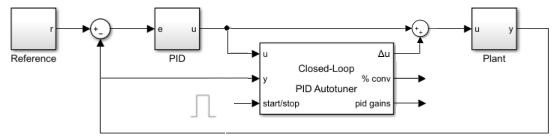
Δu — Объект ввел возмущениеБлок генерирует сигнал возмущения в этом порте. Как правило, вы вводите возмущение от этого порта через блок суммы, как показано в следующей схеме.
Когда эксперимент запускается (положительный start/stop), блок генерирует сигналы возмущения в этом порте.
Когда эксперимент не запускается (нуль start/stop или отрицательный), сигнал в этом порте является нулем. В этом состоянии блок не оказывает влияния на объект.
Чтобы включить этот порт, в Output Signal Configuration, выбирают perturbation only.
Типы данных: single | double
% conv — Сходимость оценки FRD во время экспериментаКогда эксперимент запускается (start/stop положительный), блок вводит тестовые сигналы в объект и измеряет ответ объекта в y. Это использует эти сигналы оценить частотную характеристику объекта на нескольких частотах вокруг целевой полосы пропускания для настройки. % conv указывает, как близко к завершению оценка частотной характеристики объекта. Как правило, это значение быстро повышается приблизительно до 90% после того, как эксперимент начнется, и затем постепенно будет сходиться к более высокому значению. Остановите эксперимент, когда он выровняет близкие 100%.
Типы данных: single | double
pid gains — Настроенные коэффициенты ПИДаЭтот сигнал шины с 4 элементами содержит настроенные коэффициенты ПИД P, I, D и коэффициент фильтра N. Эти значения соответствуют PiD, и N параметры в выражениях, данных в Form параметр. Первоначально, значения 0, 0, 0, и 100, соответственно. Блок обновляет значения, когда эксперимент заканчивается. Этот сигнал шины всегда имеет четыре элемента, даже если вы не настраиваете контроллер PIDF.
Если вам сопоставили ПИД-регулятор с блоком, можно обновить тот контроллер с этими значениями после того, как эксперимент заканчивается. Для этого во вкладке Block, нажмите Update PID Block.
Типы данных: single | double
estimated PM — Предполагаемый запас по фазе с настроенным контроллеромЭто выходы порта предполагаемый запас по фазе, достигнутый настроенным контроллером, в градусах. Блок обновляет это значение, когда настраивающийся эксперимент заканчивается. Предполагаемый запас по фазе вычисляется от угла G (jωc) C (jωc), где G является предполагаемым объектом, C является настроенным контроллером, и ωc является частотой среза (полоса пропускания). Предполагаемый запас по фазе может отличаться от целевого запаса по фазе, заданного Target phase margin (degrees) параметр. Это - индикатор робастности и устойчивости, достигнутой настроенной системой.
Как правило, предполагаемый запас по фазе около целевого запаса по фазе. В общем случае, чем больше значение, тем более устойчив настроенная система, и меньше перерегулирования, там.
Отрицательный запас по фазе указывает, что система с обратной связью может быть нестабильной.
Чтобы включить этот порт, во вкладке Tuning, выбирают Output estimated phase margin achieved by tuned controller.
frd — Предполагаемая частотная характеристикаЭто выходы порта данные частотной характеристики оценивается экспериментом. Первоначально, значение в frd [0, 0, 0, 0, 0]. Во время эксперимента блок вводит сигналы на частотах [1/10, 1/3, 1, 3, 10] ωc, где ωc является целевой полосой пропускания. В каждом шаге расчета во время эксперимента блок обновляет frd с вектором, содержащим комплексную частотную характеристику на каждой из этих частот, соответственно. Можно использовать прогресс ответа как альтернатива % conv исследовать сходимость оценки. Когда эксперимент останавливается, блок обновляет frd с финалом оценил частотную характеристику, используемую в вычислениях коэффициенты ПИД.
Чтобы включить этот порт, во вкладке Experiment, выбирают Plant frequency responses near bandwidth.
nominal — Ввод и вывод объекта в номинальной рабочей точкеЭто, которое выходы порта, которые вектор, содержащий объект, ввел (u+Δu) и объект, выводят (y), когда эксперимент начинается. Эти значения являются вводом и выводом объекта в номинальной рабочей точке, в которой блок выполняет эксперимент.
Чтобы включить этот порт, во вкладке Experiment, выбирают Plant nominal input and output.
Type — Действия ПИД-регулятораPI (значение по умолчанию) | PID | PIDF | ...Задайте тип ПИД-регулятора в вашей системе. Тип контроллера указывает на то, какие действия присутствуют в контроллере. Следующие типы контроллера доступны для автонастройки ПИД-регулятора:
P — Пропорциональный только
I — Интеграл только
PI — Пропорциональный и интеграл
PD — Пропорциональный и производный
PDF — Пропорциональный и производный с производным фильтром
PID — Пропорциональный, интеграл и производная
PIDF — Пропорциональный, интеграл и производная с производным фильтром
Когда вы обновите блок PID Controller или пользовательский ПИД-регулятор с настроенными значениями параметров, убедитесь соответствия типа контроллера.
Настраиваемый: да
Параметры блоков: PIDType |
| Ввод: символьный вектор |
Значения: 'P' | 'I' | 'PI' | 'PD' | 'PDF' | 'PID' | 'PIDF' |
Значение по умолчанию: 'PI' |
Form — Форма ПИД-регулятораParallel (значение по умолчанию) | IdealЗадайте форму контроллера. Форма контроллера определяет интерпретацию коэффициентов ПИДа P, I, D и N.
Parallel — В Parallel сформируйтесь, передаточная функция дискретного времени, которое контроллер PIDF:
где Fi (z) и Fd (z) является интегратором и фильтрует формулы (см. Integrator method и Filter method). Передаточная функция параллельной формы непрерывного времени контроллер PIDF:
Другие действия контроллера составляют установку P, I или D, чтобы обнулить.
Ideal — В Ideal сформируйтесь, передаточная функция дискретного времени, которое контроллер PIDF:
Передаточная функция идеальной формы непрерывного времени контроллер PIDF:
Другие действия контроллера составляют установку D, чтобы обнулить или установка, I к Inf. (В идеальной форме у контроллера должно быть пропорциональное действие.)
Когда вы обновите блок PID Controller или пользовательский ПИД-регулятор с настроенными значениями параметров, убедитесь соответствия формы контроллера.
Настраиваемый: да
Параметры блоков: PIDForm |
| Ввод: символьный вектор |
Значения: 'Parallel' | 'Ideal' |
Значение по умолчанию: 'Parallel' |
Time Domain — Временной интервал ПИД-регулятораЗадайте, является ли ваш ПИД-регулятор контроллером дискретного времени или непрерывного времени.
В течение дискретного времени необходимо задать шаг расчета ПИД-регулятора с помощью параметра Controller sample time (sec).
В течение непрерывного времени необходимо также задать шаг расчета для эксперимента автонастройки ПИД-регулятора с помощью параметра Experiment sample time (sec).
Параметры блоков:
TimeDomain |
| Ввод: символьный вектор |
Значения:
'discrete-time' | 'continuous-time' |
Значение по умолчанию:
'discrete-time' |
Controller sample time (sec) — Шаг расчета ПИД-регулятораЗадайте шаг расчета своего ПИД-регулятора в секундах. Это значение также устанавливает шаг расчета для эксперимента, выполняемого блоком.
Чтобы выполнить настройку ПИДа, блок измеряет информацию о частотной характеристике до частоты 10 раз целевой полосы пропускания. Чтобы гарантировать, что эта частота меньше частоты Найквиста, целевая полоса пропускания, ωc, должна удовлетворить ωc Ts ≤ 0.3, где Ts
, ωc является шагом расчета контроллера, который вы задаете с Controller sample time (sec) параметр.
Когда вы обновите блок PID Controller или пользовательский ПИД-регулятор с настроенными значениями параметров, убедитесь соответствия шага расчета контроллера.
Если вы хотите запустить развернутый блок с различными шагами расчета в вашем приложении, установите этот параметр на –1 и поместите блок в Triggered Subsystem. Затем инициируйте подсистему в желаемом шаге расчета. Если вы не планируете изменить шаг расчета после развертывания, задайте фиксированный и конечный шаг расчета.
Чтобы включить этот параметр, установите Time Domain на discrete-time.
Параметры блоков:
DiscreteTs |
| Ввод: скаляр |
| Положительная скалярная величина значения | –1 |
| Значение по умолчанию: 0.1 |
Tune at different sample time — Позвольте настроиться в различном шаге расчета от ПИД-регулятора и экспериментаoff (значение по умолчанию) | onПозвольте этому параметру запустить настройку на уровне частоты дискретизации, которая отличается от частоты дискретизации ПИД-регулятора, который вы настраиваете и эксперимент оценки частотной характеристики, выполняемый блоком. Настраивающий алгоритм коэффициента ПИД в вычислительном отношении интенсивен, и, когда это необходимо, развернуть блок в оборудование и настроить контроллер с быстрым шагом расчета, некоторое оборудование не может завершить вычисление коэффициента ПИД в одном временном шаге. Чтобы уменьшать аппаратные требования пропускной способности, задайте настраивающийся шаг расчета медленнее, чем шаг расчета контроллера с помощью параметра Tuning sample time (sec).
Чтобы включить этот параметр, установите Time Domain на discrete-time.
Параметры блоков:
UseTuningTs |
| Ввод: символьный вектор |
Значение
'off' | 'on' |
Значение по умолчанию:
'off' |
Tuning sample time (sec) — Шаг расчета настраивающегося алгоритмаЗадайте шаг расчета настраивающегося алгоритма в секундах.
Если вы намереваетесь развернуть блок на оборудовании с ограниченной вычислительной мощностью и хотеть настроить контроллер с быстрым шагом расчета, задать шаг расчета, таким образом, что настраивающийся алгоритм запускается на более медленном уровне, чем ПИД-регулятор, вы настраиваетесь.
Чтобы включить этот параметр, установите Time Domain на discrete-time и выберите Tune at different sample time.
Параметры блоков:
TuningTs |
| Ввод: скаляр |
| Положительная скалярная величина значения |
| Значение по умолчанию: 0.2 |
Experiment sample time (sec) — Шаг расчета для экспериментаДаже когда вы настраиваете контроллер непрерывного времени, необходимо задать шаг расчета для эксперимента, выполняемого блоком. В общем случае контроллеру непрерывного времени, настраивающемуся, не рекомендуют для автонастройки ПИД-регулятора против физического объекта. Если вы хотите настроиться в непрерывное время против модели Simulink объекта, используйте быстрый шаг расчета эксперимента, такой как 0.02/ωc.
Этот параметр включен, когда Time Domain является continuous-time.
Параметры блоков:
ContinuousTs |
| Ввод: положительная скалярная величина |
| Значение по умолчанию: 0.02 |
Integrator method — Дискретная формула интегрирования для термина интегратораForward Euler (значение по умолчанию) | Backward Euler | TrapezoidalЗадайте дискретную формулу интегрирования для термина интегратора в вашем контроллере. В дискретное время передаточная функция ПИД-регулятора, принятая блоком:
в параллельной форме, или в идеальной форме,
Для шага расчета контроллера Ts, Integrator method параметр определяет формулу Fi можно следующим образом:
| Метод интегратора | Fi |
|---|---|
Forward Euler |
|
Backward Euler |
|
Trapezoidal |
|
Для получения дополнительной информации об относительных преимуществах каждого метода, смотрите страницу с описанием блока Discrete PID Controller.
Когда вы обновите блок PID Controller или пользовательский ПИД-регулятор с настроенными значениями параметров, убедитесь соответствия метода интегратора.
Настраиваемый: да
Этот параметр включен, когда Time Domain является discrete-time и контроллер включает интегральное действие.
Параметры блоков: IntegratorFormula |
| Ввод: символьный вектор |
Значения: 'Forward Euler' | 'Backward Euler' | 'Trapezoidal' |
Значение по умолчанию: 'Forward Euler' |
Filter method — Дискретная формула интегрирования для производного термина фильтраForward Euler (значение по умолчанию) | Backward Euler | TrapezoidalЗадайте дискретную формулу интегрирования для производного термина фильтра в вашем контроллере. В дискретное время передаточная функция ПИД-регулятора, принятая блоком:
в параллельной форме, или в идеальной форме,
Для шага расчета контроллера Ts, Filter method параметр определяет формулу Fd можно следующим образом:
| Отфильтруйте метод | Fd |
|---|---|
Forward Euler |
|
Backward Euler |
|
Trapezoidal |
|
Для получения дополнительной информации об относительных преимуществах каждого метода, смотрите страницу с описанием блока Discrete PID Controller.
Когда вы обновите блок PID Controller или пользовательский ПИД-регулятор с настроенными значениями параметров, убедитесь соответствия метода фильтра.
Настраиваемый: да
Этот параметр включен, когда Time Domain является discrete-time и контроллер включает производный термин фильтра.
Параметры блоков: FilterFormula |
| Ввод: символьный вектор |
Значения: 'Forward Euler' | 'Backward Euler' | 'Trapezoidal' |
Значение по умолчанию: 'Forward Euler' |
Target bandwidth (rad/sec) — Целевая частота среза настроенного ответаЦелевая полоса пропускания, заданная в рад/секунда, является целевым значением для частоты среза с 0 усилениями дБ настроенного ответа разомкнутого контура CP, где P является ответом объекта, и C является ответом контроллера. Эта частота среза примерно устанавливает полосу пропускания управления. Для времени нарастания секунды τ хорошее предположение для целевой полосы пропускания является 2/τ рад/секунда.
Чтобы выполнить настройку ПИДа, блок автотюнера измеряет информацию о частотной характеристике до частоты 10 раз целевой полосы пропускания. Чтобы гарантировать, что эта частота меньше частоты Найквиста, целевая полоса пропускания, ωc, должна удовлетворить ωc Ts ≤ 0.3, где Ts является шагом расчета контроллера, который вы задаете параметром Controller sample time (sec). Из-за этого условия самое быстрое время нарастания, которое можно осуществить для настройки, о 6.67Ts. Если это время нарастания не удовлетворяет вашим целям проекта, рассмотрите уменьшающий Ts.
Для лучших результатов с настройкой с обратной связью используйте целевую полосу пропускания, которая является приблизительно в факторе 10 из полосы пропускания с начальным ПИД-регулятором. Чтобы настроить контроллер для большего изменения в полосе пропускания, настройте инкрементно использование меньших изменений.
Чтобы обеспечить целевую полосу пропускания через входной порт, выберите Use external source.
Параметры блоков:
Bandwidth |
| Ввод: положительная скалярная величина |
Значение по умолчанию:
1 |
Target phase margin (degrees) — Предназначайтесь для минимального запаса по фазе ответа разомкнутого контураЗадайте целевой минимальный запас по фазе для настроенного ответа разомкнутого контура в частоте среза. Целевой запас по фазе отражает желаемую робастность настроенной системы. Как правило, выберите значение в области значений приблизительно 45 °-60 °. В общем случае более высокий запас по фазе улучшает перерегулирование, но может ограничить скорость ответа. Значение по умолчанию, 60 °, имеет тенденцию балансировать эффективность и робастность, давая приблизительно к 5-10%-му перерегулированию, в зависимости от характеристик вашего объекта.
Чтобы обеспечить целевой запас по фазе через входной порт, выберите Use external source.
Настраиваемый: да
Параметры блоков: TargetPM |
| Ввод: скаляр |
| Значения: 0–90 |
| Значение по умолчанию: 60 |
Experiment Mode — Синусоидальный тип сигнала возмущенияSuperposition (значение по умолчанию) | SinestreamЗадайте, применяется ли возмущение на каждой частоте последовательно (Sinestream) или одновременно (Superposition).
Sinestream — В этом режиме блок применяет возмущение на каждой частоте отдельно. Для получения дополнительной информации о сигналах sinestream для оценки, см. Входные сигналы Sinestream.
Superposition — В этом режиме сигнал возмущения включает все заданные частоты целиком. Для оценки частотной характеристики в векторе из частот ω = [ω 1, …, ωN] в амплитудах A = [A 1, …, AN], сигнал возмущения:
Режим Sinestream может быть более точным и может также быть менее навязчивым, потому что общий размер возмущения никогда не больше, чем значения, заданные параметром Sine Amplitudes. Однако из-за последовательной природы sinestream возмущения, каждая точка частоты вы добавляете увеличения рекомендуемое время эксперимента (см. входной порт start/stop для деталей). Таким образом эксперимент оценки обычно намного быстрее в режиме Superposition удовлетворительными результатами.
Сигналы Sinestream уменьшают время выполнения по сравнению с входными сигналами суперпозиции, но также и занимают больше времени, чтобы оценить частотную характеристику. Оценка частотной характеристики с помощью sinestream сигналы полезна, когда вы ограничили вычислительную мощность, и вы хотите уменьшать время выполнения.
Параметры блоков:
ExperimentMode |
| Ввод: символьный вектор |
Значения:
'Superposition' | 'Sinestream' |
Значение по умолчанию:
'Superposition' |
Plant Type — Устойчивость объектаStable (значение по умолчанию) | IntegratingЗадайте, устойчив ли объект или объединяется. Если объект имеет один или несколько интеграторов, выберите Integrating.
Параметры блоков:
PlantType |
| Ввод: символьный вектор |
Значения:
'Stable' | 'Integrating' |
Значение по умолчанию:
'Stable' |
Plant Sign — Знак объектаPositive (значение по умолчанию) | NegativeЗадайте, положителен ли объект или отрицателен. Если положительное изменение во входе объекта в номинальных результатах рабочей точки в положительном изменении на объекте выход, задайте Positive. В противном случае задайте отрицательный. Для устойчивых объектов знак объекта является знаком усиления DC объекта.
Параметры блоков:
PlantSign |
| Ввод: символьный вектор |
Значения:
'Positive' | 'Negative' |
Значение по умолчанию:
'Positive' |
Sine Amplitudes — Амплитуда синусоидальных возмущенийВо время эксперимента блок вводит синусоидальный сигнал в объект на частотах [1/10, 1/3, 1, 3, 10] ωc , где ωc является целевой полосой пропускания для настройки. Используйте Sine Amplitudes, чтобы задать амплитуду каждого из этих введенных сигналов. Задайте a:
Скалярное значение, чтобы ввести ту же амплитуду на каждой частоте
Вектор из длины 5, чтобы задать различную амплитуду в каждом из [1/10, 1/3, 1, 3, 10] ωc
На типичном объекте с типичной целевой полосой пропускания не значительно различаются величины ответов объекта на частотах эксперимента. В таких случаях можно использовать скалярное значение, чтобы применить то же возмущение величины на всех частотах. Однако, если вы знаете, что ответ затухает резко по частотному диапазону, рассмотрите уменьшение амплитуды входных параметров более низкой частоты и увеличения амплитуды входных параметров более высокой частоты. Для эксперимента оценки численно лучше, когда все ответы объекта имеют сопоставимые величины.
Амплитуды возмущения должны быть:
Достаточно большой, что возмущение преодолевает любую мертвую зону в приводе объекта и генерирует ответ выше уровня шума
Достаточно маленький, чтобы поддерживать объект в рабочем состоянии приблизительно в линейной области около номинальной рабочей точки и постараться не насыщать ввод или вывод объекта
Когда Experiment mode является Superposition, синусоидальные сигналы накладываются. Таким образом возмущение может быть, по крайней мере, столь же большим как сумма всех амплитуд. Убедитесь, что крупнейшее возмущение в области значений вашего привода объекта. Насыщение привода может ввести ошибки в предполагаемую частотную характеристику.
Чтобы обеспечить амплитуды синуса через входной порт, выберите Use external source.
Настраиваемый: да
Параметры блоков:
AmpSine |
| Ввод: скаляр, вектор из длины 5 |
| Значение по умолчанию: 1 |
Reduce memory and avoid task overrun (external mode only) — Разверните настраивающийся алгоритм толькоoff (значение по умолчанию) | onБлок содержит два модуля, тот, который выполняет оценку частотной характеристики в реальном времени и ту, которая использует получившийся предполагаемый ответ, чтобы настроить коэффициенты ПИД. Когда вы запускаете модель Simulink, содержащую блок во внешнем режиме симуляции, по умолчанию оба модуля развертываются. Можно сохранить память на целевом компьютере путем развертывания модуля оценки только (см. Управление Автонастройка ПИД-регулятора В реальном времени в Simulink). В этом случае настраивающийся алгоритм работает на хосте - компьютере Simulink вместо целевого компьютера. Когда эта опция выбрана, развернутое использование алгоритма приблизительно одна треть столько же памяти как тогда, когда опция очищена.
Вычисление коэффициента ПИД требует большего количества вычислительной загрузки, чем оценка частотной характеристики. Для быстрых шагов расчета контроллера некоторое оборудование не может закончить вычисление усиления в одном цикле выполнения. Поэтому при использовании оборудования с ограниченной вычислительной мощностью, выбирая эту опцию позволяет вам настроить ПИД-регулятор с быстрым шагом расчета.
Кроме того, когда вы включаете эту опцию, может быть задержка нескольких периодов выборки между тем, когда настраивающийся эксперимент заканчивается и когда новые коэффициенты ПИД прибывают в выходной порт pid gains. Прежде, чем продвинуть усиления контроллеру, сначала подтвердите изменение в выходном порту pid gains вместо того, чтобы использовать сигнал start/stop в качестве триггера для обновления.
Если вы намереваетесь развернуть блок и выполнить ПИД, настраивающийся, не используя внешний режим симуляции, не выбирайте эту опцию.
Внимание
Когда вы используете эту опцию, модель должна быть сконфигурирована таким образом, что числовые параметры блоков являются настраиваемыми в сгенерированном коде, не встроенном. Задавать настраиваемые параметры:
В редакторе моделей: В Configuration Parameters, в Code Generation> Optimization, поведение параметра Значения по умолчанию набора к Tunable.
В командной строке: Используйте set_param(mdl,'DefaultParameterBehavior','Tunable').
Параметры блоков:
DeployTuningModule |
| Ввод: символьный вектор |
Значения:
'off' | 'on'
|
Значение по умолчанию:
'off' |
Configure block for PLC Coder — Сконфигурируйте блок для генерации кода с Simulink PLC CoderВыберите этот параметр, если вы используете Simulink PLC Coder, чтобы сгенерировать код для блока автотюнера. Очистите параметр для генерации кода с любым другим MathWorks® продукт генерации кода.
Выбор этого параметра влияет на внутреннюю настройку блока только для совместимости с Simulink PLC Coder. Параметр не оказывает действующего влияния на сгенерированный код.
Output Signal Configuration — Обеспечьте управляющий сигнал плюс возмущение или возмущение толькоПо умолчанию блок берет управляющий сигнал в качестве входа и обеспечивает управляющий сигнал плюс возмущение эксперимента в порте u+Δu. Вы затем подаете этот сигнал во вход объекта, как показано в следующей схеме.
Эта настройка по умолчанию требует вставки блока между контроллером и объектом. Если вы хотите добавить сигнал возмущения в управляющий сигнал сами, выберите perturbation only. В этой настройке блок выход содержит сигнал возмущения только в порте Δu. Вы вводите этот сигнал возмущения в использование объекта, например, блок суммы, как в следующей схеме.
В этой настройке можно опционально закомментировать блок Closed-Loop PID Autotuner, не разрушая модель.
Data Type — Точность с плавающей точкойdouble (значение по умолчанию) | singleЗадайте точность с плавающей точкой на основе среды симуляции или требований к аппаратным средствам.
Параметры блоков:
BlockDataType |
| Ввод: символьный вектор |
Значения:
'double' | 'single'
|
Значение по умолчанию:
'double' |
Clicking "Update PID Block" writes tuned gains to the PID block connected to "u" port — Автоматически обнаружьте цель для записи настроенных коэффициентов ПИДаon (значение по умолчанию) | offПри некоторых условиях блок автотюнера может записать настроенные усиления в стандартный или пользовательский блок ПИД-регулятора. Чтобы указать, что целевой ПИД-регулятор является блоком, соединенным с портом u блока автотюнера, выберите эту опцию. Чтобы задать ПИД-регулятор, который не соединяется с u, очистите эту опцию.
Чтобы записать настроенные усиления с блока автотюнера на ПИД-регулятор где угодно в модели, целевой блок должен быть также:
Блок PID Controller или Discrete PID Controller.
Подсистема маскированная, в которой коэффициенты ПИДа являются параметрами маски под названием PiD, и N, или безотносительно подмножества этих параметров существуют в вашем контроллере. Например, если вы используете пользовательский ПИ-контроллер, затем вам только нужны параметры маски P и I.
Specify PID block path — Целевой блок ПИД-регулятора для записи настроенных коэффициентов[] (значение по умолчанию) | блок pathПри некоторых условиях блок автотюнера может записать настроенные усиления в стандартный или пользовательский блок ПИД-регулятора. Используйте этот параметр, чтобы задать путь целевого ПИД-регулятора.
Чтобы записать настроенные усиления с блока автотюнера на ПИД-регулятор где угодно в модели, целевой блок должен быть также:
Блок PID Controller или Discrete PID Controller.
Подсистема маскированная, в которой коэффициенты ПИДа являются параметрами маски под названием PiD, и N, или безотносительно подмножества этих параметров существуют в вашем контроллере
Этот параметр включен, когда Clicking "Update PID Block" writes tuned gains to the PID block connected to "u" port выбран.
Update PID Block — Запишите настроенные коэффициенты ПИД, чтобы предназначаться для блока контроллераБлок автоматически не продвигает настроенные усиления с целевым блоком PID. Если ваш блок ПИД-регулятора соответствует критериям, описанным в Specify PID block path описание параметра, после настройки, нажимает эту кнопку, чтобы передать настроенные усиления блоку.
Можно обновить блок PID, в то время как симуляция запускается, включая при выполнении в режиме external mode. Выполнение так полезно для того, чтобы сразу подтвердить настроенные коэффициенты ПИД. В любое время в процессе моделирования можно изменить параметры, запустить эксперимент снова и продвинуть новые настроенные усиления с блоком PID. Можно затем продолжить запускать модель и наблюдать поведение объекта.
Export to MATLAB — Отправьте эксперимент и настраивающиеся результаты к рабочему пространству MATLABКогда вы нажимаете эту кнопку, блок создает структуру в MATLAB® рабочая область, содержащая эксперимент и настраивающая результаты. Эта структура, OnlinePIDTuningResult, содержит следующие поля:
PiDN — Настроенные коэффициенты ПИД. Структура содержит, какой бы ни из этих полей необходимы для типа контроллера, который вы настраиваете. Например, если вы настраиваете ПИ-контроллер, структура содержит P и I, но не D и N.
TargetBandwidth — Значение вы задали в параметре Target bandwidth (rad/sec) блока.
TargetPhaseMargin — Значение вы задали в параметре Target phase margin (degrees) блока.
EstimatedPhaseMargin — Предполагаемый запас по фазе достигается настроенной системой.
Controller — Настроенный ПИД-регулятор, возвращенный как a pid (для параллельной формы) или pidstd (для идеальной формы) объект модели.
Plant — Предполагаемый объект, возвращенный как frd объект модели. Это frd содержит данные об ответе, полученные на частотах эксперимента [1/10, 1/3, 1, 3, 10] ωc.
PlantNominal — Ввод и вывод объекта в номинальной рабочей точке, когда эксперимент начинается в виде структуры, имеющей поля u (введите) и y вывод .
Можно экспортировать в рабочее пространство MATLAB, в то время как симуляция запускается, включая при выполнении в режиме external mode.

