В этом примере показано, как использовать PID Tuner, чтобы импортировать данные об измеренном отклике для оценки объекта.
Если у вас есть программное обеспечение System Identification Toolbox™, можно использовать PID Tuner, чтобы оценить параметры линейной модели объекта управления на основе данных об ответе временного интервала. PID Tuner затем настраивает ПИД-регулятор для получившейся предполагаемой модели. Данные об ответе могут быть или измерены от вашей реальной системы или получены путем симуляции Simulink® модель. Оценка объекта особенно полезна, когда ваша модель Simulink не может линеаризоваться или линеаризует, чтобы обнулить. Для идентификации объекта необходимо задать конечное значение для времени остановки модели Simulink.
Когда вы импортируете данные об ответе, PID Tuner принимает, что ваши результаты измерений представляют объект, соединенный с ПИД-регулятором в цикле отрицательной обратной связи. Другими словами, PID Tuner принимает следующую структуру для вашей системы. PID Tuner принимает, что вы ввели входной сигнал в u и измеренный отклик системы в y, как показано.

Можно импортировать данные об ответе, хранимые в MATLAB® рабочая область как числовой массив, timeseries объект, или iddata Объект (System Identification Toolbox). Импортировать данные об ответе:
В PID Tuner, во вкладке PID Tuner, в меню Plant, выбирают Identify New Plant.
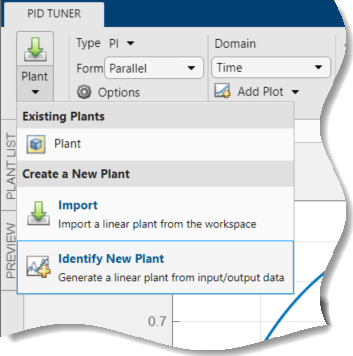
Во вкладке Plant Identification нажмите![]() Get I/O data. Выберите тип данных об измеренном отклике, которые вы имеете. Например, если вы измерили ответ своего объекта к входу шага, выберите Step Response. Чтобы импортировать ответ вашей системы к произвольному стимулу, выберите Arbitrary I/O Data.
Get I/O data. Выберите тип данных об измеренном отклике, которые вы имеете. Например, если вы измерили ответ своего объекта к входу шага, выберите Step Response. Чтобы импортировать ответ вашей системы к произвольному стимулу, выберите Arbitrary I/O Data.
В диалоговом окне Import Response введите информацию о своих данных об ответе. Например, для данных переходного процесса сохранен в переменной outputy и произведенный каждые 0,1 с:

Нажмите![]() Import. Вкладка Plant Identification открывается, отображая данные об ответе, и ответ начальной буквы оценил объект.
Import. Вкладка Plant Identification открывается, отображая данные об ответе, и ответ начальной буквы оценил объект.

В зависимости от качества и функций ваших данных об ответе, вы можете хотеть выполнить некоторую предварительную обработку на данных, чтобы улучшить предполагаемые результаты объекта. Меню Preprocess дает вам несколько опций для предварительной обработки данных об ответе, таких как удаление смещений, фильтрация или извлечение на подмножестве данных. В частности, когда данные об ответе имеют смещение, это важно для хороших идентификационных результатов удалить смещение.
Во вкладке Plant Identification нажмите ![]() Preprocess и выберите опцию предварительной обработки, которую вы хотите использовать. Вкладка открывается фигурой, которая отображает исходные и предварительно обработанные данные. Используйте опции во вкладке, чтобы задать параметры предварительной обработки.
Preprocess и выберите опцию предварительной обработки, которую вы хотите использовать. Вкладка открывается фигурой, которая отображает исходные и предварительно обработанные данные. Используйте опции во вкладке, чтобы задать параметры предварительной обработки.

(Для получения дополнительной информации о предварительной обработке опций, смотрите, Предварительно обрабатывают Данные.)
Когда вы будете удовлетворены предварительно обработанным сигналом, нажмите![]() Update, чтобы сохранить изменение в сигнале. Щелкните
Update, чтобы сохранить изменение в сигнале. Щелкните![]() , чтобы возвратиться к вкладке Plant Identification.
, чтобы возвратиться к вкладке Plant Identification.
PID Tuner автоматически настраивает параметры объекта, чтобы создать новое исходное предположение для объекта на основе предварительно обработанного сигнала ответа.
Можно теперь настроить структуру и параметры предполагаемого объекта, чтобы получить предполагаемую линейную модель объекта управления для Настройки ПИДа. Смотрите В интерактивном режиме Оценочный Объект от Измеренного или Данных о Симулированном отклике для получения дополнительной информации.
