Можно найти установившуюся рабочую точку с помощью симуляции модели. Получившаяся рабочая точка состоит из значений состояния и уровней на входе модели в заданное время снимка состояния симуляции.
Чтобы использовать основанный на симуляции расчет рабочей точки, сначала сконфигурируйте свои начальные условия модели, таким образом, что модель сходится к точке равновесия. Можно затем симулировать модель и создать рабочие точки в интерактивном режиме с помощью Steady State Manager или Model Linearizer. Можно также найти снимки состояния программно в MATLAB® командная строка с помощью findop функция.
Чтобы найти рабочие точки с помощью снимков состояния, программное обеспечение симулирует модель и создает рабочую точку в каждый раз снимка состояния симуляции. Каждая рабочая точка содержит вход и утверждает значения модели в соответствующее время снимка состояния.
Чтобы проверить, что рабочая точка в устойчивом состоянии, инициализируйте свою модель значениями рабочей точки, симулируйте модель и проверку, если ключевые сигналы и состояния в равновесии. Для получения дополнительной информации об инициализации вашей модели с рабочей точкой смотрите, Симулируют Модель Simulink в Определенной Рабочей точке.
Примечание
Если ваш Simulink® модель имеет внутренние состояния, не линеаризуйте модель в рабочей точке, которую вы вычисляете из снимка состояния симуляции. Вместо этого попытайтесь линеаризовать модель с помощью снимка состояния симуляции или в рабочей точке от основанного на оптимизации поиска. Для получения дополнительной информации смотрите Блоки Указателя с Представлением Внутреннего состояния.
Можно найти рабочую точку в заданные времена снимка состояния симуляции с помощью Steady State Manager.
Откройте модель Simulink.
sys = 'magball';
open_system(sys)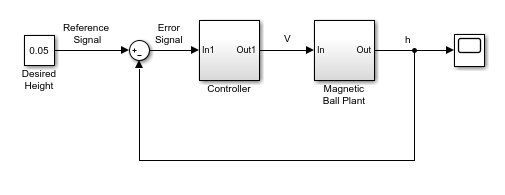
Чтобы открыть Steady State Manager, в окне модели Simulink, в галерее Apps, нажимают Steady State Manager.
Чтобы задать время снимка состояния симуляции, в Steady State Manager, на вкладке Steady State, нажимают Snapshots.
Задайте времена симуляции, в которых можно взять снимки состояния. В данном примере возьмите снимки состояния в 1 и 10 единицы измерения времени. В диалоговом окне Create Snapshot Operating Point, в поле Simulation snapshot times, вводят [1 10].
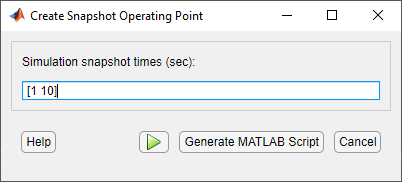
Чтобы взять снимки состояния, щелкнуть![]() .
.
Массив рабочих точек, op1, появляется в Data Browser, в разделе Operating Points. Этот массив содержит две рабочих точки, один в течение каждого заданного раза снимка состояния.
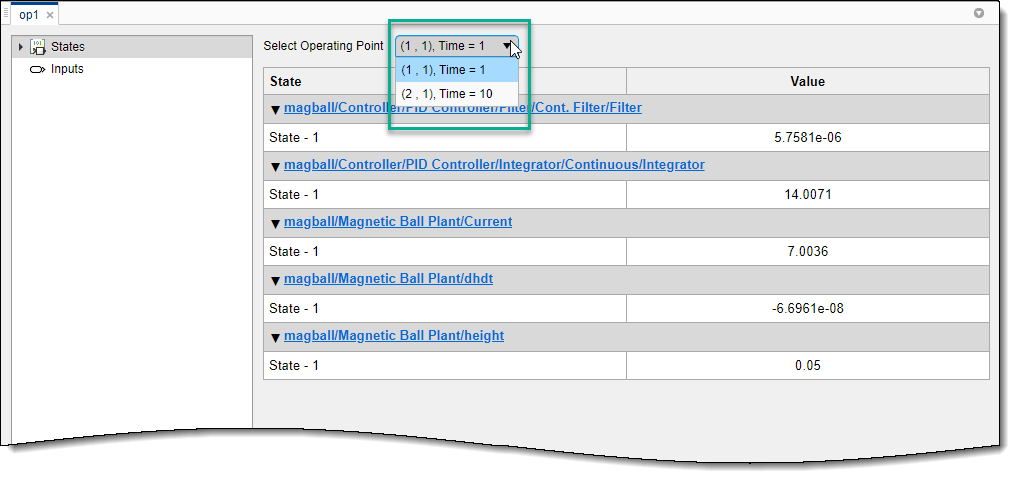
Программное обеспечение также открывает соответствующий документ op1, где можно просмотреть рабочие точки.
Чтобы выбрать который рабочая точка просмотреть, используйте Select Operating Point выпадающий список.
Можно найти рабочую точку в заданные времена снимка состояния симуляции с помощью Model Linearizer.
Откройте модель Simulink.
sys = 'magball';
open_system(sys)
Чтобы открыть Model Linearizer, в окне модели Simulink, в галерее Apps, нажимают Model Linearizer.
Чтобы задать время снимка состояния симуляции, в Model Linearizer, на вкладке Linear Analysis, в Operating Point выпадающий список, выбирают Take Simulation Snapshot.
Возьмите снимки состояния симуляции в 1 и 10 единицы измерения времени. Во Ввести времена снимка состояния, чтобы линеаризовать диалоговое окно, в поле Simulation snapshot times, вводят [1 10].
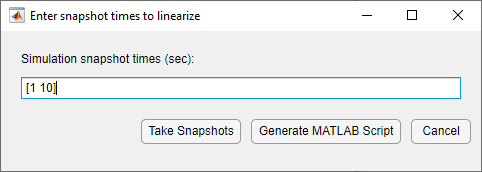
Чтобы взять снимки состояния, нажмите Take Snapshots.
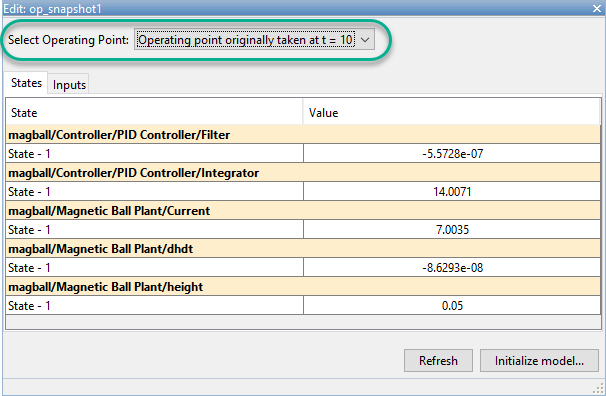
Массив рабочих точек, op_snapshot1, появляется в Data Browser, в разделе Linear Analysis Workspace. Этот массив содержит две рабочих точки, один в течение каждого заданного раза снимка состояния.
Чтобы просмотреть рабочие точки, в Linear Analysis Workspace, дважды кликают op_snapshot1. Можно выбрать который рабочая точка просмотреть использование Select Operating Point выпадающий список.
В этом примере показано, как вычислить установившуюся рабочую точку в заданные времена снимка состояния симуляции.
Откройте модель Simulink.
sys = 'magball';
open_system(sys)

Симулируйте модель и создайте рабочие точки в 1 и 10 единицы измерения времени. Программное обеспечение симулирует модель и вычисляет рабочую точку в каждый раз снимка состояния симуляции.
op = findop(sys,[1 10]);
op вектор-столбец рабочих точек, с одним элементом в течение каждого заданного раза снимка состояния.
Отобразите первую рабочую точку.
op(1)
ans =
Operating point for the Model magball.
(Time-Varying Components Evaluated at time t=1)
States:
----------
<strong>x</strong>
<strong>___________</strong>
(1.) magball/Controller/PID Controller/Filter/Cont. Filter/Filter
5.7581e-06
(2.) magball/Controller/PID Controller/Integrator/Continuous/Integrator
14.007
(3.) magball/Magnetic Ball Plant/Current
7.0036
(4.) magball/Magnetic Ball Plant/dhdt
-6.6961e-08
(5.) magball/Magnetic Ball Plant/height
0.05
Inputs: None
----------
