Измените размер ограничительных рамок
Считайте изображение.
I = imread('peppers.png');Задайте ограничительные рамки и метки.
bboxA = [
410 230 100 90
186 78 80 60
]bboxA = 2×4
410 230 100 90
186 78 80 60
labelsA = [
"garlic"
"onion"
];Измените размер изображения и ограничительных рамок.
scale = 1.5; J = imresize(I,scale); bboxB = bboxresize(bboxA,scale);
Отобразите результаты.
figure I = insertObjectAnnotation(I,'Rectangle',bboxA,labelsA); J = insertObjectAnnotation(J,'Rectangle',bboxB,labelsA); imshowpair(I,J,'montage')

bboxA — Ограничительные рамкиОграничительные рамки в виде M-by-4, M-by-5, или M-by-9 неразреженная числовая матрица ограничительных рамок M. Каждая строка, M, матрицы задают ограничительную рамку или как выровненный осью прямоугольник, вращать прямоугольник или как кубоид. Приведенная ниже таблица описывает формат ограничительных рамок.
| Boundingbox | Описание |
|---|---|
| Выровненный осью прямоугольник |
Заданный в пикселе координирует как M-by-4 числовая матрица со строками формы [x y w h], где:
|
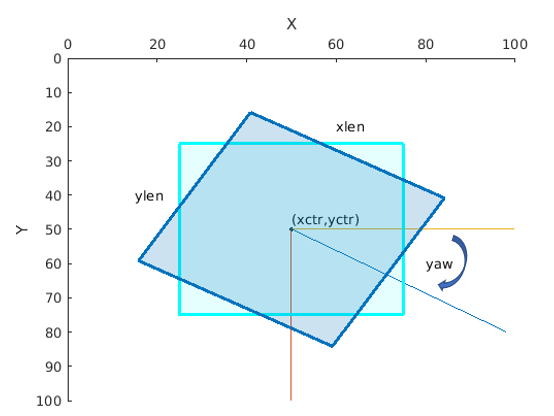
| Вращаемый прямоугольник |
Заданный в пространственных координатах как M-by-5 числовая матрица со строками формы [xctr yctr xlen ylen yaw], где:
|
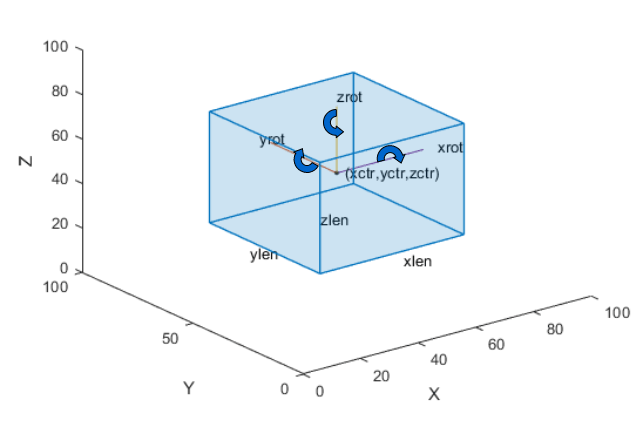
| Кубоид |
Заданный в пространственных координатах как M-by-9 числовая матрица со строками формы [xctr yctr zctr xlen ylen zlen xrot yrot zrot], где:
Рисунок показывает, как эти значения определяют положение кубоида.
|
scale шкалаМасштабируйтесь в виде скаляра или вектора-строки. Когда вы задаете скаляр, функция применяет тот же масштабный коэффициент к высоте и ширине ограничительных рамок в bboxA. Когда вы задаете вектор-строку, функция применяет фактор в первом элементе вектора, чтобы изменить размер высоты и второго элемента, чтобы изменить размер ширины ограничительных рамок.